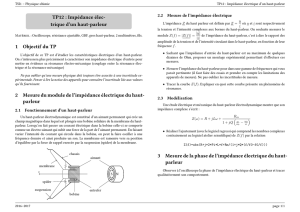
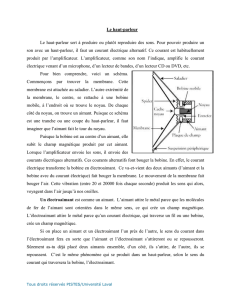
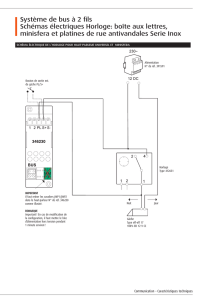
Un transducteur électrodynamique : le haut

? ? ?
1925
70
z~
B=B~ur~ur
a `
~
B ReLe

~
B
→
KrKa
~v ~
Ff=−h~v
h > 0
eg(t)i(t)
e(t)~
B
e(t)
ME
X x(t)x(t) = <[Xexp(jωt)]
EgI V
v
e=IContour
(Bv~uθ).(a~uθ)θ=B`v.

eg(t)i(t)v(t)
ReLeα=B`
Egω Eg=ZeI−αV
ZeZe
i α ~
FL
KrKa
g= 9,8−2
δeME= 7 Kr= 2.106−1
10−4
`
~
FL=h~v +ME
~v
t+KaZ~v t
FL=ZmV
Zmm
FL
IV
I
α
Zm
h.i
hegii=Rei2+hv2.
Ω0
P0Σ
z p

Fp=−kz
k P0,Σ,Ω0γ
k P0,Σ Ω0
Ka= 1,2.103−1
ReLe
Re= 4 Ω Le= 0,1|Ze|
1% Re
Le
Rm=α2
hα=B` ~
Ff=−h~v
Rm
ZB=Eg/I
ωmQ
ZB=Eg
I=Re+Rm
βm
, βm= 1 + jQ ω
ωm−ωm
ω.
βm∆
βm
ZB

x=ω
ωm
y=x−1
x
|ZB|ϕBZBy
y|ZB|
|ZB|min |ZB|max
(|ZB|, ϕB)
R0
+UAB
UBS UAS
R0= 10 Ω UAB = 0,1|ZB|=η|UBS |
η= 100 −1
cos ϕBUAB UBS UAS
ϕm
πZmo x=ω
ωm
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%