Troisième cours

8INF806 1
8INF806
Conception et analyse des algorithmes
Comment comparer deux problèmes?

8INF806 2
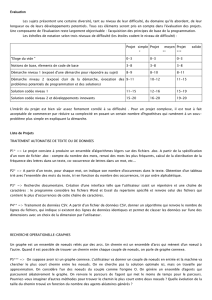
Relation entre les classes de fonctions
BPP
P
ZPP
PP
ZPP*

8INF806 3
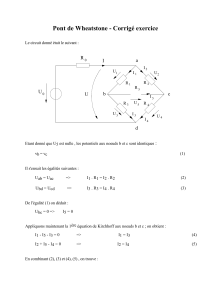
Relation entre les classes de problèmes de décision
BPP
P
RP
ZPP
co-RP
PP
NP
NPco-NP
co-NP

8INF806 4
Quelques problèmes (1)
•HC: Cycle hamiltonien dans un graphe
–DFC: graphe dirigé
–TSP: problème du comis voyageur
•CLIQUE: Trouver un ensemble maximal M de noeuds dans un
graphe tels que chaque paires de noeuds dans M sont reliées par
une arête.
–INDEPENDENT SET: Trouver un ensemble maximal M de noeuds dans
un graphe tels que aucune paire de noeuds dans M n'est reliée par une
arête.
–VERTEX COVER: Trouver un ensemble minimal de noeuds dans un
graphe tel que toute arête est adjacente à au moins un de ces noeuds.
•a-CHAMPIONSHIP: Déterminer à un moment donner de la saison si
notre équipe à des chances d'emporter la coupe: le gagnant à b≤a
points et le perdant a (a-b) points.

8INF806 5
Quelques problèmes (2)
•SAT: Satisfaisabilité: Déterminer s'il existe une affectation des n
variable booléenne permettant de satisfaire une formule logique en
forme normale conjonctive.
–3-SAT: 3 littéraux par clause
–MAX-SAT: maximiser le nombre de clauses satisfaisables.
•BINPACKING: Mettre n objets de poids divers dans des cases de
capacité b
–PARTITION: Partitionner une suite de nombres en deux ensembles
d'égales valeurs.
•2-DM: Problème du mariage dans un graphe biparti
•NETWORK FLOW: Maximiser le flot entre un noeud a et un noeud
b dans un graphe dirigé où chaque arc possède une capacité
maximale.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%