LorisVogue08-00

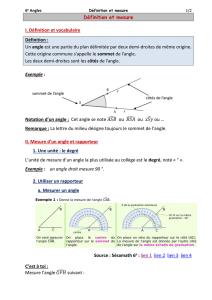
Recherche de chemins
de coût minimal
avec l’algorithme A*
Mise en œuvre pratique
Olivier NOCENT
IUT de Reims-Châlons-Charleville
rue des crayères, BP 1035
51687 Reims Cedex 2

Introduction
Objectif : Déterminer, pour un agent*donné, un
chemin de coût minimum depuis un sommet
source vers un sommet destination au sein d’un
graphe orienté.
Un agent est un objet informatique autonome
utilisé pour représenter une entité mobile dotée
d’un comportement (humain, animal, véhicule,
…)

Applications
Jeux vidéo
Animation des personnages non joueurs (RPG, FPS)
Déplacement réaliste d’un personnage contrôlé par le
joueur vers un objectif désigné par le joueur (RTS)
Simulation –vie artificielle
Etude du comportement d’une foule, du traffic
automobile, …
Effets spéciaux (scènes de bataille, …)

Représentation du graphe à partir
d’informations topographiques

Relations d’adjacence : grille carrée
Prairie
Rivière
Pont
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
1
/
55
100%