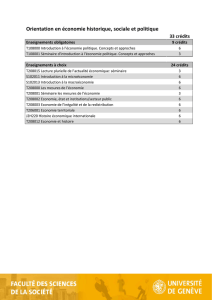
L`automatique, une démarche de projet - IGEN STI

IGEN STI 9 juillet 20091
Séminaire CPGE - Paris
L’automatique, une démarche de projet
Longtemps la technique des asservissements est
pratiquement demeurée l’apanage des mécaniciens. À
l’image du régulateur à boules inventé par James Watt
en 1790, les régulateurs étaient réalisés par des systèmes
de conception exclusivement mécaniques et bien
entendu, les réglages relevaient de l’empirisme et de
l’expérimentation.
Un peu d’histoire…

IGEN STI 9 juillet 20092
Séminaire CPGE - Paris
L’automatique une approche moderne
C’est par le développement de l’électronique et en
particulier par l’intégration des calculateurs
numériques (calcul opérationnel) que cette discipline
a acquis ses lettres de noblesse tant sur le plan des
réalisations que sur le plan théorique en s’appuyant
sur les travaux de mathématiciens français tels
Cauchy, Fourier et Laplace. Pendant de nombreuses
années, les régulateurs se sont limités à la classique
structure « PID » car toutes les solutions plus
élaborées étaient difficiles à réaliser industriellement.

IGEN STI 9 juillet 20093
Séminaire CPGE - Paris
L’automatique aujourd’hui
Aujourd’hui, l’évolution de l’électronique vers des solutions
numériques qui se traduisent par l’intégration de calculateurs
numériques puissants, la création de langages de haut niveau
maîtrisant les problèmes liés au temps « réel », voire une
approche entièrement graphique de la programmation, offrent
un développement quasiment sans limite des méthodes
modernes de l’automatique.
Ces méthodes modernes s’imposent sur le plan de la
commande par la réalisation de régulateurs prédictifs, de
logique floue ou de commandes neuronales, ainsi que sur
l’identification en ligne des différents paramètres des modèles
de connaissance représentant le comportement des systèmes

IGEN STI 9 juillet 20094
Séminaire CPGE - Paris
L’automatique et les modèles
Avant toutes choses, il est indispensable
d’établir un modèle comportemental du
système à commander. Ceci nécessite
l’écriture d’un modèle de connaissance, ou
bien d’un modèle de comportement (appelé
boîte noire) ou de tous modèles intermédiaires
(boîtes grises).

IGEN STI 9 juillet 20095
Séminaire CPGE - Paris
Un modèle de connaissance
Les modèles de connaissance sont élaborés à
partir des lois de la physique ou de la chimie.
L’objectif étant d’expliciter le fonctionnement
d’un système par une relation mathématique.
Ces modèles peuvent être assez complexes et
comporter de nombreux paramètres à identifier
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
1
/
34
100%