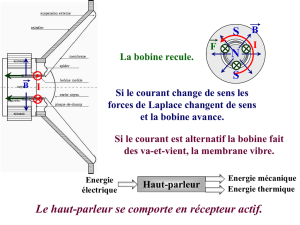
Voir la pièce jointe LE HAUT PARLEUR

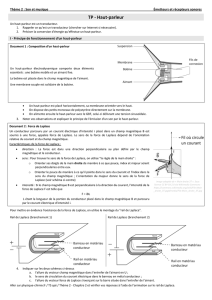
LE HAUT-PARLEUR
HISTOIRE ET CONCEPTION
DES
HAUTS PARLEURS

PLAN
1. Quelques rappels historiques.
2. Différents types de hauts-parleurs.
3. Étude détaillée d’un haut-parleur
électrodynamique.
4. Enceinte bass-reflex.
5. Enceinte globale.

1 Rappels historiques.
•1667 - Robert Hooke (1635 –1703) réalise un « téléphone » à ficelle.
•1861 –un professeur allemand Philip Reis réalise un premier
microphone transmettant des sons discontinus.
•1876 –Graham Bell dépose un brevet concernant les micros de
téléphone.
•1878 –Edison construit un phonographe à feuille d’étain enroulée sur
un cylindre. Il réalise également un microphone à charbon.
•1880 –1890 : perfectionnement des microphones à charbon.
•A partir de 1899, la Berliner Grammophon édite des disques de 17
cm, une face.
•1920 –Eugène Reisz fabrique des micros à charbon d’excellente
qualité utilisés jusqu’à la guerre de 1939 – 1945.

1 Rappels historiques.
•1928 –Fritz Pfleumer invente la bande magnétique.
•1930 –Harry Olson invente le micro à ruban.
•1936 –la firme allemande AEG présente un premier appareil
d’enregistrement appelé Magnetophon.
•1939 –Eugen Beyer présente le premier microphone dynamique.
•1947- Fritz Sennheiser produit son premier microphone dynamique
MD 2.
•1948 –Premier disque microsillon 33 t/mn.
•1952 –Stefan Kudelski construit le magnétophone Nagra I
•1958 –Premiers microsillons stéréophoniques.
•1962 –G.M. Sessler met au point les premiers micros à électrets.

1 Rappels historiques.
•1964 –Commercialisation de la Compact Cassette par Philips.
•1968 –Présentation du Nagra IV-S à transistors, stéréophonique
double piste (avec adaptateur pour bobine de 26 cm).
•1979 –Philips, Sony et Hitachi présentent le Compact Disc.
•1983 –Sony annonce la naissance du magnétophone numérique
(DAT) dont la commercialisation aura lieu en 1987.
•1995/96 –Apparition des premiers graveurs de CD-R grand public
puis des disques CD-RW.
(pour une histoire plus détaillée consulter le site ci-dessous :
http://claude.gendre.9online.fr/index.htm
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
1
/
42
100%