lycee h.poincare

LYCEE H.POINCARE
Programme de SII D
1
X
1
Y
2
X
1
2
3
4
Mécanique
Automatisme
ANALYSE
FONCTIONNELLE

LYCEE H.POINCARE
Mécanique
D
1
X
1
Y
2
X
1
2
3
4

3
LYCEE H.POINCARE
Mécanique
Modélisation D
1
X
1
Y
2
X
1
2
3
4
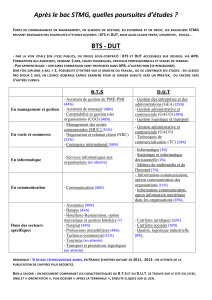
Schéma cinématique paramétré
0
3
1
2
4
L4/0
L0/1 L1/2
L2/3
L3/4
Graphe des liaisons

4
LYCEE H.POINCARE
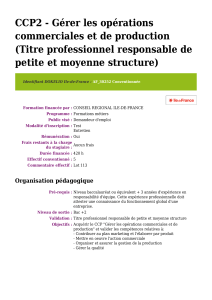
Mécanique
Cinématique D
1
X
1
Y
2
X
1
2
3
4
0
3
1
2
4
L4/0
L0/1 L1/2
L2/3
L3/4
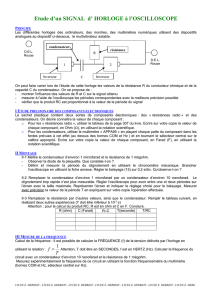
Cinématique analytique: Calcul position, vitesse et
accélération d’un point d’un solide.
Fermeture chaîne de solide;géométrique et cinématique.
Cinématique graphique: Pour Pb plan; calcul de la vitesse
d’un point d’un solide dans une position donnée.

5
LYCEE H.POINCARE
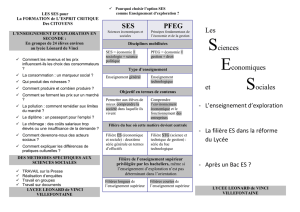
Mécanique
Cinématique: analytique
0
3
1
2
4
L4/0
L0/1 L1/2
L2/3
L3/4 Définition des torseurs cinématiques des
liaisons:
L0/1 :Liaison pivot d’axe (B, ).
0
z
1/0 0
1/0 0
B
B
z
1/0 0
1/0
1/0 0
D
D
z
DB z
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
1
/
52
100%