m - Lip6

Ordonnancement en
présence d’agents
individualistes
Réunion DMDC, 11 juin 2008

2
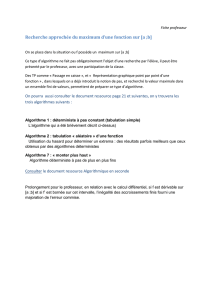
Ordonnancement P||Cmax
m machines identiques
ntâches
toute tâche ia une longueur li
Objectif : minimiser le makespan (la plus
grande date de fin)
M2M2
M1M1

3
Algorithmes d’approximation
Algorithme -approché: retourne un
ordonnancement dont le makespan est au
plus fois le makespan optimal.
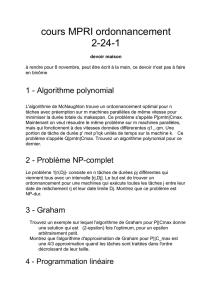
SPT (Shortest Processing Time first)
2-1/m approché
LPT (Largest Processing Time first)
4/3-1/(3m) approché
1
M1
M2
2
23
4
Exemple: tâches de longueur 1, 2, 2, 3, 4

Plan
Optimisation combinatoire en présence
d’agents individualistes.
Problèmes de stabilité (les agents ont un
certain degré de liberté)
Exemple dans des systèmes distribués
Exemple dans un système centralisé
Problèmes de véracité des informations (les
agents ont des caractéristiques privées)
4

5
Performance des systèmes
distribués
Chaque machine ja un algorithme local
d’ordonnancement. Cet algorithme ne
dépend que des tâches que jordonnance :
mécanisme de coordination [Christodoulou et al.
ICALP’04]
Exemple: 2 machines,
Machine 1 : ordonnance les tâches selon l’ordre SPT,
Machine 2 : ordonnance les tâches selon l’ordre LPT
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
1
/
30
100%