Sommaire Algorithmes génétiques …………………………………..3

GA|PM
- 2 -
Sommaire
Algorithmes génétiques …………………………………..3
Introduction……………………………………………….3
Définition …………………………………………………3
Rapport biologique vs informatique ………...………….3
Principe de base ……………...…………………………..3
Les opérateurs génétiques ……………………………….4
1. L’opérateur d’initialisation ……………………….4
2. L’opérateur de sélection …………..………………4
3. L’opérateur de croisement (crossover) ……….….5
4. L’opérateur de mutation ………………………….5
5. Remplacement ……………………………………..5
Exemple ……..……………………………………………5
Domaines …………………………………...…………….6
Avantages et inconvénients..…….………………………6
GA|MP…………………………………………………….7
Principe ……………………………………….………….8
Domaine ……………………………………….…………9
Conclusion ……………………………………………….9
Référencées ……………………………………………..10

GA|PM
- 3 -
Algorithmes génétiques
Introduction :
Il existe de nombreux algorithmes évolutionnaires et nous ne pouvons pas parler des algorithmes
génétiques sans mentionner les méthodes de programmation évolutionnaire développée par Fogel
[1966] et les stratégies évolutionnaires développées indépendamment par Rechenberg [1973] et
Schwefel [1981]. Ils ont contribué énormément à l’intérêt porté aux algorithmes évolutionnaires.
Définition :
Les algorithmes génétiques sont des méthodes basées sur les mécanismes biologiques tels que les
lois de Mendel et sur le principe fondamental (sélection) de Charles Darwin [1859]. Holland exposa
les principes de ces algorithmes pour permettre aux ordinateurs "d’imiter les êtres vivants en évoluant"
pour rechercher la solution à un problème. Il expliqua d’abord comment ajouter de l’intelligence dans
un programme informatique avec les croisements (échange du matériel génétique) et la mutation
(source de la diversité génétique).
Plus récemment, Goldberg enrichit la théorie des algorithmes génétiques en s’appuyant sur le
parallèle suivant [1989] :
– un individu est lié à un environnement par son code d’ADN,
– une solution est liée à un problème par son indice de qualité,
– une "bonne" solution à un problème donné peut être vue comme un individu susceptible de survivre
dans un environnement donné.[1]
Rapport biologique vs informatique :
Au siècle dernier, Charles Darwin observa les phénomènes naturels et fit les constatations suivantes
[1859] :
– L’évolution n’agit pas directement sur les êtres vivants ; elle opère en réalité sur les
chromosomes contenus dans leur ADN.
– L’évolution a deux composantes : la sélection et la reproduction. La sélection garantit une
reproduction plus fréquente des chromosomes des êtres vivants les plus robustes.
– La reproduction est la phase durant laquelle s’effectue l’évolution.
La terminologie employée est empruntée à la génétique :
– Les chromosomes sont les éléments à partir desquels sont élaborées les solutions (individus).
– La population est l’ensemble des chromosomes.
– La reproduction est l’étape de combinaison des chromosomes. La mutation et le croisement
génétiques sont des méthodes de reproduction.
D’autres notions sont propres au domaine des algorithmes génétiques. [1]
Principe de base :
Les algorithmes génétiques simulent le processus d’évolution d’une population. A partir d’une
population de N solutions du problème représentant des individus, on applique des opérateurs simulant
les interventions sur le génome tel que le croisement (cross-over) ou la mutation pour arriver à une
population de solutions de mieux en mieux adaptée au problème. Cette adaptation est évaluée grâce à
une fonction coût.

GA|PM
- 4 -
Les opérateurs génétiques :
1. L’opérateur d’initialisation :
Cet opérateur est utilisé pour générer la population initiale de l’algorithme génétique. La population
initiale doit contenir des chromosomes qui soient bien répartis dans l’espace des solutions pour fournir
à l’algorithme génétique un matériel génétique varié. La façon la plus simple est de générer
aléatoirement les chromosomes.
2. L’opérateur de sélection :
La sélection tend à augmenter l’importance des bonnes solutions par rapport aux mauvaises.
C’est une heuristique utilisée par l’algorithme génétique : les bonnes solutions sont supposées être
les plus prometteuses pour la génération de descendants.
Il existe plusieurs méthodes de sélection. Les plus connues sont la sélection proportionnelle à la
fonction fitness, la sélection sur le rang et la sélection en tournoi.
L’indice de qualité (fitness), aussi appelé indice de performance, est une mesure abstraite permettant
de classer les chromosomes.

GA|PM
- 5 -
3. L’opérateur de croisement (crossover) :
L’opérateur de croisement combine le matériel de un ou plusieurs parents pour obtenir un ou
plusieurs enfants. Il existe différents types de croisement, nous allons brièvement présenter les trois
principaux : Le croisement un point détermine aléatoirement un point de coupure et échange la
deuxième partie des deux parents. Le croisement deux points (qui peut être étendu à points) possède
2 points (ou ) de coupures qui sont déterminés aléatoirement. Enfin le crossover uniforme échange
chaque bit avec une probabilité fixé à ½.
4. L’opérateur de mutation :
Le rôle de la mutation consiste à faire apparaître de nouveaux gènes. Cet opérateur introduit une
diversité nécessaire à l’exploration de l’espace de recherche en permettant de générer des points dans
des régions a priori sans intérêt .La mutation la plus simple sur un chromosome change un bit de façon
aléatoire. Un chromosome a une probabilité de mutation d’un taux .
5. Remplacement :
Cette dernière étape du processus itératif consiste en l’incorporation des nouvelles solutions dans la
population courante. Les nouvelles solutions sont ajoutées à la population courante en remplacement
(total ou partiel) des anciennes solutions. Généralement, les meilleures solutions remplacent les plus
mauvaises ; il en résulte une amélioration de la population. Lorsque la nouvelle population n’est
constituée que de nouvelles solutions, on parle d’algorithme génétique générationnel.
Exemple :
Problème : On cherche à optimiser (Max) la fonction = sur l’intervalle [0.31].
Taille de la population entre 0 et 30 en codage binaire sur 5 bits (00000 à 11111).
La population initiale constituée de 4 individus choisis arbitrairement :
13 de code 01101
24 de code 11000
8 de code 01000
19 de code 10011
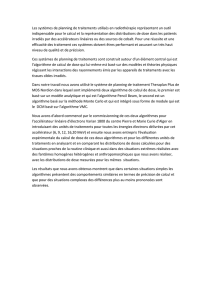
Fonction de performance pour chaque individu : correspond à = . On en déduit la
fonction fitness qui est une répartition par pourcentage de ces performances.
14%
49%
6%
31%
Ventes
13=>169 24=>576 8=>64 19=>361

GA|PM
- 6 -
On tire au hasard 4 nouvelles chaînes parmi les existantes en tenant compte de la valeur de
répartition. On obtient, par exemple : 13, 24, 24 et 19.
On prend les individus 2 par 2. On coupe les chromosomes à une position aléatoire et on
croise les parties coupées :
13 :0110||1 01100=12 24 :11||000 11011=27
24 :1100||0 11001=21 19 :10||011 10111=16
On opère par tirage aléatoire à partir d’une probabilité de mutation définie initialement. On
prend ici 0,05 donc sur les 20 bits des 4 chromosomes, on suppose qu’un seul allèle a été
sélectionné et mute.12 :01100 => 01000 =8
8, 21, 27, 16.
Si on somme les performances, on obtient 1490 au lieu de 1170 à la génération précédente.
Domaines :
Les algorithmes génétiques ont été largement utilisés dans le cadre de l’extraction de
connaissances.
On les retrouve dans toutes les tâches principales. Leur application en sélection d’attributs a surtout été
réalisée en optimisation mono-objectif à l’aide de méthodes enveloppantes notamment avec le
classifier K-Nearest-Neighbor, avec un réseau de neurones ou avec des tables de décisions
euclidiennes. En optimisation multi-objectif, les travaux sont plus rares. Leur application à la sélection
d’attributs pour le clustering est relativement peu fréquente.
Les algorithmes génétiques sont régulièrement utilisés pour réaliser une tâche de clustering. Les
Différents algorithmes proposés diffèrent aussi bien par l’approche de clustering utilisée que par
leur application à des données réelles. Ainsi il existe des travaux ayant comme approche la méthode
des médusoïdes, la méthode des Kmeans , ou une approche hiérarchique. Les applications sont
diversifiées : données spatiales, données d’expression génique et de données de biopuces.
Avantages et inconvénients :
D’abord, les algorithmes génétiques sont coûteux en temps de calcul, puisqu’ils manipulent
plusieurs solutions simultanément. C’est le calcul de la fonction de performance qui est le plus
pénalisant, et on optimise généralement l’algorithme de façon à éviter d’évaluer trop souvent cette
fonction.
Ensuite, l’ajustement d’un algorithme génétique est délicat. L’un des problèmes les plus
caractéristiques est celui de la dérive génétique, qui fait qu’un bon individu se met, en l’espace de
quelques générations, à envahir toute la population. On parle dans ce cas de convergence prématurée,
qui revient à lancer à une recherche locale autour d’un minimum… qui n’est pas forcément l’optimum
attendu. Les méthodes de sélection proportionnelle peuvent en particulier favoriser ce genre de dérive.
Un autre problème surgit lorsque les différents individus se mettent à avoir des performances
similaires : les bons éléments ne sont alors plus sélectionnés, et l’algorithme ne progresse plus.
Le choix d’une représentation « intelligente » pour permettre un remplacement générationnel
efficace est un autre aspect de la question, et l’efficacité d’un algorithme génétique dépend beaucoup
de la façon dont on opère le croisement des individus. Ainsi, dans le cas du problème du voyageur de
commerce, on peut envisager d’apparier selon la méthode des coupures, telles que nous l’avons vu
plus haut. Considérons les deux tournées suivantes, et opérons une coupure entre la troisième et la
quatrième ville, puis inversons les gènes :
 6
7
8
9
6
7
8
9
1
/
9
100%