Lidar Géophysique Fondamentaux Lidar (1/2)

PHF École d’été lidar géophysique, Aspet, 23 juin au 2 juillet 2010 1
Lidar Géophysique
Lidar Géophysique
Fondamentaux Lidar (1/2)
Fondamentaux Lidar (1/2)
Pierre H. Flamant
Institut Pierre Simon Laplace
Laboratoire de Météorologie Dynamique
École Polytechnique, Palaiseau
Courriel: [email protected]
Téléphone: 01 69 33 51 50

PHF École d’été lidar géophysique, Aspet, 23 juin au 2 juillet 2010 2
•Lidar (Light Detection And Ranging) est une méthode de
télédétection active qui utilise un laser comme émetteur pour
des mesures portant sur la composition, les propriétés
physiques et la dynamique de l’atmosphère, la topographie des
surfaces naturelles et des zones urbanisées, les propriétés
physiques de la végétation
• Les Lidars sont utilisés en observation de la terre et pour
l’exploration planétaire
• Les premières études ont lieu dans les années 30, et le nom
Lidar a été proposé dans les années 50
• Les premières applications du laser au lidar ont suivi la mise en
œuvre du 1e laser à rubis en 1960
• Le lidar a pris de l’importance dans les années 1980 mais les
performances limitée des différentes technologies : laser,
détecteurs, électronique, informatique, ont freiné les
applications
Le Lidar
Le Lidar

PHF École d’été lidar géophysique, Aspet, 23 juin au 2 juillet 2010 3
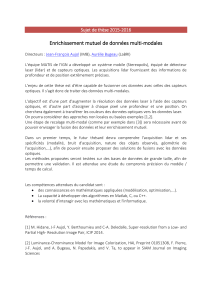
La Famille Lidar
Topographie urbaine Végétation, canopée
atmosphère
Avril 2006
Bathymétrie
Odyssée spatiale
CALIPSO

PHF École d’été lidar géophysique, Aspet, 23 juin au 2 juillet 2010 4
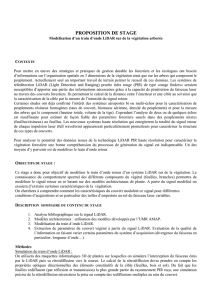
Applications

PHF École d’été lidar géophysique, Aspet, 23 juin au 2 juillet 2010 5
• Atmosphère
– Qualité de l’air, pollution : composition gaz traces, particules
– Météorologie (p, T, u, V) : champ de vent
– Climat : bilan radiatif (nuages, aérosols, GES), cycle
hydrologique (nuages, vapeur d’eau), cycle du carbone (CO2,
CH4), …
• Surfaces
– Continentales: topographie, archéologie, régions côtières,
végétation, agriculture, géologie,
– Eaux continentales
– Océaniques
• Géodésie : distance terre-lune, suivi de satellite, …
• Automobile
• Militaires
• Altimétrie (topographique) pour l’exploration lunaire et planétaire
Applications
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
1
/
84
100%