Excitateur électromagnétique de broche d`usinage

Excitateur ´
electromagn´
etique de broche d’usinage
David TLALOLINI1,2, Sylvain RIALLAND3, Mathieu RITOU1,2
David NOEL1,2, S´
ebastien LE LOCH1,2, Benoˆ
ıt FURET1,2
1IRCCyN, UMR-CNRS 6597, 1 rue de la no¨
e - BP 92101 - 44321 NANTES Cedex 3 - France
2Universit´
e de Nantes-IUT de Nantes, 2 av du Professeur Jean Rouxel, 44475 Carquefou - France
3SYNERVIA, Rue Christian Pauc - BP 10605 - 44306 NANTES Cedex 3 - France
david.tlalolini@irccyn.ec-nantes.fr - [email protected] -
mathieu.ritou@irccyn.ec-nantes.fr - david.noel@irccyn.ec-nantes.fr -
[email protected] - benoit.furet@irccyn.ec-nantes.fr
Resum´
e
Dans cet article, nous pr´
esentons un syst`
eme amplificateur-excitateur ´
electromagn´
etique ca-
pable de solliciter des broches d’usinage tournant `
a haute vitesse. Ce syst`
eme est constitu´
e de
quatre amplificateurs de puissance et de quatre ´
electro-aimants pour produire des forces ´
electro
magn´
etiques, exp´
erimentalement, autour de 200 N dans une gamme des fr´
equences de 0 `
a 4000
Hz. L’analyse de la sollicitation radiale de la broche par notre syst`
eme, nous a permis de mesurer
la Fonction de R´
eponse en Fr´
equence `
a vitesses de rotation comprises entre 4000 et 24000 tr/mn.
L’int´
erˆ
et principale de notre syst`
eme est donc de mesurer le comportement vibratoire des broches
de fac¸on `
a optimiser son utilisation en usinage.
Mots-cl´
es: Excitateur ´
electromagn´
etique, excitateur de broche, analyse modale, amplificateur
de puissance
1 Introduction
L’objectif premier est d’identifier exp´
erimentalement le comportement dynamique des broches
d’usinage `
a grandes vitesses. La mod´
elisation a montr´
e que la Fonction de R´
eponse en Fr´
equence
(not´
ee par la suite FRF) ´
evolue avec la vitesse de rotation de la broche [1]. Afin de pouvoir tra-
cer ces diagrammes de Campbell, il nous a ´
et´
e n´
ecessaire de d´
evelopper un dispositif sp´
ecifique
permettant l’excitation d’un rotor, tout en ´
evitant tout contact ou frottement entre la partie en
mouvement et la partie fixe. Aucun syst`
eme commercial ne convenant, l’objectif du laboratoire
IRCCyN a ´
et´
e de concevoir et de r´
ealiser un module d’excitation ´
electromagn´
etique. Ce module
est constitu´
e de quatre ´
electro-aimants `
a noyau de Fer-Silicium, dont le courant est asservi pour
produire des efforts radiaux sur le rotor suivant deux axes perpendiculaires.
Afin de mieux r´
epondre `
a la quantification du comportement vibratoire des broches, notre
excitateur a ´
et´
e dimensionn´
e de mani`
ere `
a produire des efforts atteignant 200 N, du continu jus-
qu’`
a des fr´
equences de 4 kHz. Pour ce faire, les parties ´
electrique, magn´
etique et m´
ecanique ont
´
et´
e conc¸ues. Les simulations num´
eriques effectu´
ees sous simulink ont permis de dimensionner
l’´
electro-aimant. Pour chaque axe, deux ´
electro-aimants sont pilot´
es constituant ainsi les action-
neurs de notre syst`
eme. Le dispositif a ´
et´
e fabriqu´
e par l’IRCCyN, `
a l’IUT de Nantes. Pour ali-
menter ces actionneurs, des amplificateurs de puissance asservis en courant ont ´
et´
e sp´
ecifiquement
conc¸us et r´
ealis´
es par SYNERVIA, partenaire de l’IRCCyN. Ils sont bas´
es sur des ponts en H per-
mettant de fournir 15A en continu. Enfin, le profil d’effort appliqu´
e`
a la broche est pilot´
e`
a l’aide

d’une interface graphique ´
egalement conc¸ue au sein du laboratoire. Cette interface, d´
evelopp´
ee
sous Labview, fournit les consignes de r´
ef´
erence aux amplificateurs et g`
ere l’acquisition et le trai-
tement des signaux (courants, d´
eplacements et efforts).
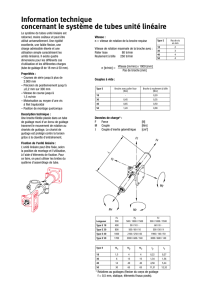
2 Module excitateur ´
electromagn´
etique
2.1 Pr´
esentation de l’excitateur ´
electromagn´
etique
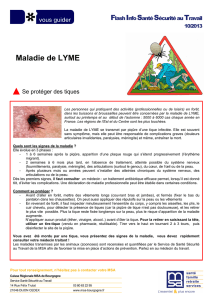
L’excitateur ´
electromagn´
etique est constitu´
e de quatre ´
electro-aimants, chacun d´
efinissant un
quart de la structure statorique de l’excitateur. Cette configuration peut s’expliquer par le fait
qu’un ´
electro-aimant ne peut g´
en´
erer que des forces d’attraction. Pour solliciter un axe comprenant
deux directions, il faut donc deux ´
electro-aimants. Cette configuration `
a quatre ´
electro-aimants est
illustr´
ee dans la figure 1.
a) b)
FIGURE 1 – Illustration du placement des quatre ´
electro-aimants et vue du module excitateur
Pour notre application, les ´
electro-aimants ont ´
et´
e d´
esign´
es en forme de fer `
a cheval, compos´
es
de deux bobines raccord´
ees en parall`
ele de fac¸on `
a former un pˆ
ole nord et un pˆ
ole sud. Les circuits
magn´
etiques ont ´
et´
e fabriqu´
es `
a base de tˆ
oles en Fer-3%Silicium `
a grains orient´
es, GO. Pour
obtenir un flux magn´
etique convenablement circulaire, les tˆ
oles `
a GO ont ´
et´
e assembl´
ees en les
d´
ecalant d’un angle de 90 degr´
es par rapport `
a la direction de laminage d’une tˆ
ole par rapport `
a
celle qui la pr´
ec`
ede, [2]. Les d´
etails techniques sont donn´
es dans le tableau 1.
2.2 Estimation de la force
La valeur de la force dans un ´
electro-aimant d´
epend de la densit´
e de flux Bet de la surface S
travers´
ee par le flux. Lorsqu’on utilise un ´
electro-aimant o`
u les deux pˆ
oles sont utilis´
es pour attirer
une masse, la force agissant sur la masse est donn´
ee par l’expression :
F=B2S
µ0
(1)
o`
u
–Fest la force d’attraction, en newtons [N] ;
–Best la densit´
e de flux, en teslas [T] ;
–Sest la section travers´
ee, en m2et
–µ0la perm´
eabilit´
e du vide : µ0= 4 π×10−7.

Dans une configuration `
a quatre ´
electro-aimants o`
u quatre paires de pˆ
oles sont utilis´
ees pour
g´
en´
erer des efforts radiaux, la force est donn´
ee par l’´
equation :
F=B2S
8µ0
cos(π/8) (2)
o`
u la section Sde chaque pˆ
ole est calcul´
ee en fonction du diam`
etre int´
erieur dde l’excitateur
et la largeur du pˆ
ole w, [3]. La section est donc donn´
ee par l’´
equation :
S=d π 0.5w(3)
En choisissant la valeur de B= 1,6T, valeur hors saturation, la force maximale qu’on peut
atteindre sur une section S= 60,5×10−3·π·0,5·13,6×10−3sera de 304,06 N.
Donn´
ees des ´
electro-aimants
Nombre de bobines 2
Raccordement des bobines parall`
ele
Nombre de spires par bobine 46
Diam`
etre du fil 1,25 mm
R´
esistance par ´
electro-aimant 0,02216 Ω
Inductance par ´
electro-aimant 0,973 mH
TABLE 1–D´
etails techniques d’un ´
electro-aimant
2.3 Mode d’asservissement
Lorsqu’un courant circule dans les bobines d’un ´
electro-aimant, une force ´
electromagn´
etique
est produite dans une seule direction. Pour solliciter un axe comprenant deux directions, deux
´
electro-aimants sont asservis pour produire des forces ´
electromagn´
etiques. Ce mode d’asservisse-
ment entraˆ
ıne `
a piloter les ´
electro-aimants en mode diff´
erentiel, c’est-`
a-dire, lorsque les ´
electro-
aimantes sont aliment´
es par un courant constant, appel´
e courant de pr´
e-magn´
etisation I0, un cou-
rant Ixest additionn´
e`
a l’´
electro-aimant exerc¸ant une force dans la direction positive et il est sous-
trait de l’´
electro-aimant oppos´
e, ce qui permet d’avoir un comportement dans le courant de com-
mande et l’effort g´
en´
er´
e sur l’axe [4]. Le pilotage s’effectue ainsi en boucle ouverte. Un exemple
de ce mode de pilotage pour l’axe yest illustr´
e dans la figure 3.
Amplificateur
Amplificateur
y
x
0
I
y
FIGURE 2 – Sch´
ema du mode diff´
erentiel de pilotage des ´
electro-aimants

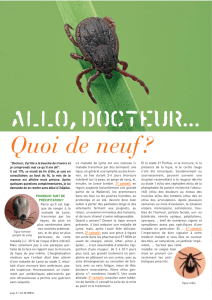
2.3.1 Amplificateurs de puissance
Quatre amplificateurs de puissance ont ´
et´
e conc¸us par l’´
equipe EETR de SYNERVIA. Ils four-
nissent les courants qui circulent dans les bobines des ´
electro-aimants. Il s’agit d’amplificateurs
`
a modulation de largeur d’impulsions (MLI) architectur´
es autour de ponts en H permettant de
fournir 15A en continu et 10Arms jusqu’`
a des fr´
equences de 5kHz. A partir d’une consigne en
tension (±10V de forme quelconque de DC jusqu’`
a 5kHz), ils assurent l’asservissement en cou-
rant dans la charge et ont la capacit´
e de piloter des bobines dont l’inductance peut aller de 200µH
jusqu’`
a plusieurs mH. Le synoptique simplifi´
e ci-dessous pr´
esente le fonctionnement g´
en´
eral d’un
amplificateur.
Consigne 0-10V +
_
Mesure Is
Commande et signalisation façade
Régulateur
proportionnel
Régulateur
Intégral
Contrôleur
/
limiteur
/
Sécurité
Générateur
PWM
Pont
H
G
Amplificateur de broche
Synoptique simplifié
Courant Is
FIGURE 3 – Synoptique simplifi´
e d’un amplificateur
Chaque amplificateur se pr´
esente sous forme d’une cassette 6U 21TE ce qui permet de com-
poser un ensemble homog`
ene de quatre amplificateurs dans un rack 19” 6U. La photo des deux
amplificateurs est illustr´
ee dans la figure 4
FIGURE 4 – Photo du rack avec deux amplificateurs

3 Plateforme exp´
erimentale
La plateforme exp´
erimentale a comme objectif de mesurer la FRF d’une broche d’usinage. A
cette fin, la broche sera sollicit´
ee radialement par l’excitateur pour pouvoir tracer les diagrammes
de Campbell `
a diff´
erentes vitesses de rotation.
3.1 Configuration de la plateforme
La figure 5 illustre une photo de la plateforme exp´
erimentale mise en place. Elle est constitu´
ee
de l’excitateur ´
electromagn´
etique, deux capteurs `
a courants de Foucault KEYENCE EX-201 et une
platine dynamom´
etrique Kistler type 9255B pour mesurer les d´
eplacements et les efforts produits
par la sollicitation radiale. La broche sollicit´
ee est une broche Fischer MFW2310-24 mont´
ee sur
une Machine-Outil `
a Commande Num´
erique Huron KX30. Le syst`
eme d’acquisition et g´
en´
eration
de donn´
ees CompacDAQ-9172 de National Instruments a´
et´
e utilis´
e pour fournir les consignes de
r´
ef´
erence aux amplificateurs et pour g´
erer l’acquisition et le traitement des signaux.
FIGURE 5 – Illustration de la plateforme exp´
erimentale.
3.2 Param´
etrage choisi
Apr`
es la configuration de la plateforme exp´
erimentale, la sollicitation de la broche sera ef-
fectu´
ee suivant l’axe y. Les signaux de consigne sont d´
efinis par la superposition du courant de
pr´
e-magn´
etisation I0et d’un courant sinuso¨
ıdale Iydont la fr´
equence varie lin´
eairement. Ce mode
de sollicitation est couramment nomm´
ee swept sinus. Il nous permettra d’obtenir une FRF pour
une vitesse de rotation de broche donn´
ee, sur un balayage en fr´
equence continue. Ce balayage en
fr´
equence est comprise entre une plage de 0 `
a 4000 Hz. Le courant est donc d´
efini par l’´
equation
suivante :
Iy=Asin (Φ(t)) (4)
avec
Φ(t) = 2 πδft2+f0t, δf=fe−f0
T(5)
o`
uAest l’amplitude, f0et fesont respectivement les fr´
equences initiale et finale de la gamme des
fr´
equences et Test la dur´
ee du balayage en secondes. Les courants r´
egul´
es, proportionnels aux
 6
7
6
7
1
/
7
100%