Modul- und Konzeptbeschreibung

Utilisation libre pour les instituts publics de formation et de R&D. © Siemens AG 2016. Tous droits réservés.
Module 020-100 TIA Portal
Description du process Installations de tri
Curriculum SCE
Siemens Automation Cooperates with Education | 02/2016

Curriculum SCE | Module 020-100 TIA Portal, édition 02/2016 | Digital Factory, DF FA
Utilisation libre pour les instituts publics de formation et de R&D. © Siemens AG 2016. Tous droits réservés. 2
Document1
Formations
Pour les formations Siemens SCE régionales, contactez votre interlocuteur SCE régional
siemens.com/sce/contact
Plus d'informations sur le programme SCE
siemens.com/sce
Remarque d’utilisation
Les dossiers de formation SCE pour la solution d'automatisation cohérente Totally Integrated Automation
(TIA) ont été spécialement créés pour le programme "Siemens Automation Cooperates with Education
(SCE)" à des fins de formation pour les instituts publics de formation et de R&D. Siemens AG n’assume
aucune responsabilité quant au contenu.
Cette documentation ne peut être utilisée que pour une première formation aux produits/systèmes
Siemens. Autrement dit elle peut être copiée, en partie ou en intégralité, pour être distribuée aux
participants à la formation afin qu'ils puissent l'utiliser dans le cadre de leur formation. La diffusion et la
duplication de cette documentation, l'exploitation et la communication de son contenu sont autorisées au
sein d’instituts publics de formation et de formation continue.
Toute exception requiert au préalable l’autorisation écrite de la part des interlocuteurs Siemens AG :
Monsieur Roland Scheuerer roland.scheuerer@siemens.com.
Toute violation de cette règle expose son auteur au versement de dommages et intérêts. Tous droits
réservés, en particulier en cas de délivrance de brevet ou d'enregistrement d'un modèle déposé.
Il est expressément interdit d’utiliser cette documentation pour des cours dispensés à des clients
industriels. Tout usage de cette documentation à des fins commerciales est interdit.
Nous remercions l'Université technique de Dresde, en particulier Prof. Dr.-Ing. Leon Urbas et Dipl.-Ing.
Annett Pfeffer, l’entreprise Michael Dziallas Engineering ainsi que toutes les personnes ayant contribué à
la réalisation des dossiers de formation.

Curriculum SCE | Module 020-100 TIA Portal, édition 02/2016 | Digital Factory, DF FA
Utilisation libre pour les instituts publics de formation et de R&D. © Siemens AG 2016. Tous droits réservés. 3
Document1
Sommaire
1 Description de la fonction ..................................................................................................................... 4
1.1 Descriptif technique ...................................................................................................................... 4
1.2 Schéma technologique ................................................................................................................. 4
1.3 Mise en marche ............................................................................................................................ 5
1.4 Sélection du mode de fonctionnement ......................................................................................... 5
1.5 ARRETD'URGENCE .................................................................................................................... 5
1.6 Mode manuel ................................................................................................................................ 5
1.6.1 Entrer et sortir le vérin .......................................................................................................... 5
1.6.2 Moteur du convoyeur en marche par à-coups ...................................................................... 5
1.6.3 Position initiale ...................................................................................................................... 5
1.7 Mode automatique ........................................................................................................................ 6
1.7.1 Démarrage et arrêt ............................................................................................................... 6
1.7.2 Commande du convoyeur ..................................................................................................... 6
1.7.3 Commande du vérin ............................................................................................................. 6
1.7.4 Vitesse de transmission (vitesse du convoyeur) .................................................................. 7
1.7.5 Régulation de vitesse ........................................................................................................... 7
1.8 Voyant lumineux ........................................................................................................................... 7
2 Tableau d'affectation............................................................................................................................. 8
3 Description des éléments de l'installation ........................................................................................... 10
3.1 Commande manuelle .................................................................................................................. 10
3.1.1 Bouton ................................................................................................................................. 10
3.1.2 Commutateur ...................................................................................................................... 10
3.1.3 Alarme Bouton d'arrêt d'urgence ........................................................................................ 10
3.2 Capteurs ..................................................................................................................................... 10
3.2.1 Commutateur de position .................................................................................................... 10
3.2.2 Interrupteur de fin de course ............................................................................................... 10
3.2.3 Barrières photoélectriques / Capteurs optiques ................................................................. 10
3.2.4 Détection du métal / capteur inductif .................................................................................. 10
3.2.5 Vitesse de rotation du moteur ............................................................................................. 11
3.3 Actionneurs ................................................................................................................................. 11
3.3.1 Moteur du convoyeur .......................................................................................................... 11
3.3.2 Vérin .................................................................................................................................... 11
3.3.3 Affichage ............................................................................................................................. 11
4 Brève description de la simulation ...................................................................................................... 12

Curriculum SCE | Module 020-100 TIA Portal, édition 02/2016 | Digital Factory, DF FA
Utilisation libre pour les instituts publics de formation et de R&D. © Siemens AG 2016. Tous droits réservés. 4
Document1
DESCRIPTION DU PROCESS - INSTALLATIONS
DE TRI
Le chapitre suivant décrit l'exemple de processus "Installation de tri".
1 Description de la fonction
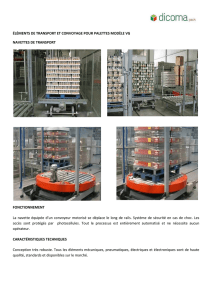
1.1 Descriptif technique
L'installation de tri automatisée (voir Figure 1) est utilisée pour séparer les pièces en plastique
et les pièces en métal Un toboggan fait glisser une pièce sur le convoyeur à bande. Une fois
que la pièce est détectée, le convoyeur démarre. Si la pièce est en métal, elle est détectée est
transportée jusqu’à la hauteur du compartiment à métal puis poussée dans le compartiment
par un vérin. Si le métal n'est pas détecté, c'est qu'il s'agit d'une pièce en plastique. La pièce
en plastique est transportée jusqu'à la fin du convoyeur, la pièce tombe dans le compartiment
à plastique. Dès qu'une pièce est triée, la pièce suivante est engagée.
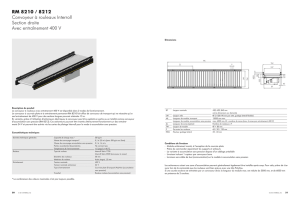
1.2 Schéma technologique
Figure 1 : Schéma technologique
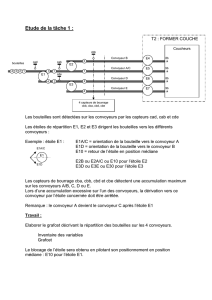
Figure 2 : Pupitre de commande

Curriculum SCE | Module 020-100 TIA Portal, édition 02/2016 | Digital Factory, DF FA
Utilisation libre pour les instituts publics de formation et de R&D. © Siemens AG 2016. Tous droits réservés. 5
Document1
1.3 Mise en marche
L'installation est mise en marche via le commutateur principal -Q0 Le relais -K0 (Automate
"Marche'") s'enclenche et fournit la tension d'alimentation pour les capteurs et actionneurs.
Cet état de fonctionnement est signalé par le voyant lumineux -P1 (Installation "Marche").
1.4 Sélection du mode de fonctionnement
Une fois que l'installation est en marche, deux modes de fonctionnement sont possibles :
manuel ou automatique. Le choix du mode de fonctionnement s'effectue via le commutateur
-S0.
Le mode de fonctionnement choisi est signalé par les voyants lumineux -P2 (Mode de
fonctionnement "manuel“) et -P3 (Mode de fonctionnement "automatique").
1.5 ARRETD'URGENCE
Si l'ARRET D'URGENCE (-A1) est actif, alors tous les entraînements doivent être stoppés
immédiatement.
Si la fonction d'arrêt d'urgence est inactive, alors l'installation peut repartir qu'après un
nouveau signal de démarrage.
L'activation de l'arrêt d'urgence est signalée par le voyant lumineux -P4 (Arrêt d'urgence
activé).
1.6 Mode manuel
En mode manuel, on configure l'installation.
1.6.1 Entrer et sortir le vérin
Une fois que le bouton -S5 (Sortir vérin -M4) est actionné, le vérin -M4 avance. Une fois qu'il a
atteint sa position la plus avancée (sortie), le vérin reste en position. Lorsque le bouton -S4 est
actionné, le vérin se retire. Le changement de direction doit être possible à tout instant. Aucun
mouvement ne doit être possible si des deux boutons sont actionnés.
1.6.2 Moteur du convoyeur en marche par à-coups
Le bouton -S3 (Marche par à-coups convoyeur -M1 avant) permet de déplacer le moteur -Q1
(Moteur du convoyeur -M1 avant vitesse de rotation fixe) vers l'avant par à-coup. Le bouton
-S4 (Marche par à-coups convoyeur -M1 arrière) permet de déplacer le moteur -Q2 (Moteur
du convoyeur -M1 arrière vitesse de rotation fixe) vers l'arrière par à-coup. En cas
d'actionnement des deux boutons, il doit rester immobile.
Pour des raisons de sécurité, seule la vitesse définie par défaut peut être utilisée. La sortie
-Q3 (Moteur du convoyeur -M1 vitesse variable) doit donc être désactivée.
1.6.3 Position initiale
Au démarrage ou en cas d'arrêt d'urgence, l'installation doit être placée en mode manuel dans
un état de fonctionnement défini (position initiale). En position initiale, le convoyeur est vide et
à l'arrêt, le vérin est rentré.
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%