Contrôleur de vitesse

Edition 2017
UP
Umot
Idauer
Imax
Iel max
fPWM
η
V DC
V DC
A
A
A
Nm
g
kHz
%
min-¹
min-¹
min-¹
min-¹
µs
°C
°C
5 ... 28
0 ... 28
4
8
0,03
5
0,5 ... 0,6
160
96
95
500 ... 100 000
50 ... 60 000
50 ... 30 000
100 ... 30 000
500
≤ 65 535
– 25 ... + 60
– 25 ... + 85
SC 2804 S
2-quadrants PWM
configurable par ordinateur
Combinaison avec:
Micromoteurs C.C. et
Servomoteurs C.C. sans balais
Contrôleur de vitesse
Tension d‘alimentation pour l‘électronique
Tension d‘alimentation pour le moteur
Courant de sortie en régime permanent max. 1)
Courant de pointe à la sortie max.
Courant total de repos
Entrée/sortie (partiellement à configuration libre)
Couple de serrage, vis bornier
Poids
Fréquence de commutation PWM 2)
Rendement
Gamme de vitesse:
– moteurs sans balais avec capteurs Hall (digitale)
– moteurs sans balais avec capteurs Hall (analogique)
– moteurs sans balais avec capteurs Hall digitale + codeur
– micromoteurs C.C. avec codeur
Periode d’échantillonnage
Résolution du codeur avec micromoteurs C.C.
Gamme de température de fonctionnement
Gamme de température de stockage
1) à température ambiante de 22°C
2) pour moteurs C.C. sans balais et sans capteurs de Hall:
fPWM
24 kHz
SC 2804Série
© DR. FRITZ FAULHABER GMBH & CO. KG
Sous réserve de modifications.
Pour les indications concernant durée de vie ainsi que les données
techniques complémentaires voir „Informations techniques”.
Page 1/6
Version
Contrôleur Option
4) Moteur Type de capteurs
Spécification com-
Vitesse à Nr. d’article Conformité
de vitesse série
mande de vitesse 1)
Unsoll
=10 V
SC 2804 S 3530 BL Capteurs Hall (digitaux) 3) 0 ... 10 V 20 000 min-¹ 6500.01390 CE
SC 2804 S 3531 DC Codeur incrémental 2) 0 ... 10 V 10 000 min-¹ 6500.01391 CE
SC 2804 S 4763 BL Codeur absolu 2-pôles 0 ... 10 V 30 000 min-¹ 6500.01598
SC 2804 S 4289 BL Capteurs Hall (analogiques) 2-pôles 0 ... 10 V 20 000 min-¹ 6500.01473
SC 2804 S 3980 BL Codeur absolu 4-pôles 0 ... 10 V 20 000 min-¹ 6500.01438
SC 2804 S 4764 BL Capteurs Hall (analogiques) 4-pôles 0 ... 10 V 10 000 min-¹ 6500.01600
SC 2804 S 4475 BL Hall (digitaux) + codeur 3) 0 ... 10 V 20 000 min-¹ 6500.01521
SC 2804 S 4476 BL Hall (digitaux) + brake/enable 3) 0 ... 10 V 20 000 min-¹ 6500.01523
1) La gamme de vitesse peut être configurée par l’interface. Versions avec PWM et autres configurations sont disponibles sur demande.
2) Valeur prédéfinie: 512 lignes.
3) Préconfigurés d’usine pour les moteurs 2-pôles. Pour le fonctionnement avec des moteurs 4-pôles le contrôleur de vitesse
doit être reconfiguré avec le logiciel “FAULHABER Motion Manager”.
4) Pour modifier le réglage d’usine l’utilisation d’un adaptateur de programmation est nécessaire (voir accessoires).
Versions
lignes/tour
Accessories
Veuillez trouver notre large gamme d’accessoires au chapitre
« Accessoires ».
Informations pour commande
Exemple:
SC 2804 S 3530
www.faulhaber.com

Edition 2017
Dessin coté et informations de branchement SC 2804 S
© DR. FRITZ FAULHABER GMBH & CO. KG
Sous réserve de modifications.
Pour les indications concernant durée de vie ainsi que les données
techniques complémentaires voir „Informations techniques”.
Page 2/6
SC 2804 S
1 UP
2 Umot
3 GND
4 Unsoll
5 DIR
6 FG
7 IO 2
8 IO 1
9 Mot C
10 Mot B
11 Mot A
12 SGND
13 VCC
14 Sens C
15 Sens B
16 Sens A
(5x) ø3,5
65
50
18
3,6
(4x)
22 ±0,3
3±0,2
RM 5
40 50 58
1
89
16
Connexions
Nr. Fonction
Echelle réduite
www.faulhaber.com

Edition 2017
Connexion “UP”:
UP
Tension d‘alimentation électronique
Connexion “Umot”:
Umot
Tension d‘alimentation moteur
Connexion “GND”: masse
Connexion “Unsoll”:
Uin
= 0 ... 10 V / > 10 V ... max. UP
1) (version standard)
– entrée analogique commande de vitesse
Uin
< 0,15 V arrêt du moteur
Uin
> 0,3 V (0,5 V)
2) démarrage du moteur
– entrée digitale
commande de vitesse PWM
500 ... 18 000 Hz
duty cycle d = 0% moteur à l’arrêt
d = 50% moitié de la vitesse maximale
d = 100% vitesse max.
entrée resistance
Rin
≥ 5 kΩ
niveau signal PLC 7,5 ...
UB
niveau haut
0 ... 2 niveau bas
niveau signal TTL 6) 2,8 ...
UB
niveau haut
0 ... 0,5 niveau bas
Connexion “DIR”:
– entrée digitale sens de rotation mise à la masse ou niveau < 0,5 V horaire
niveau > 3,0 V antihoraire
entrée resistance Rin ≥ 10 kΩ
Connexion “FG”: max.
UP
/ 15 mA
collecteur ouvert avec resistance pull-up 4)
– sortie de défaut reliée à la masse GND pas d’erreur
–
sortie fréquence (seulement moteur sans balais)
1, 3, 6, 8, 16 5) lignes par tour
Connexion “IO1“, “IO2”: n.c. réservé
– entrée digitale 6)
niveau signal TTL 2,8 ...
Up
high
0 ... 0,5 low
(IO2) high moteur activé
low moteur désactivé
(IO1) high moteur à l’arrêt
low moteur tourne
Connection “VCC ”:
Tension de sortie 5 V DC pour usage externe
Courant de sortie max. pour SC 1801 S, F, P »
ICC
= 25 mA
SC 2402 P »
ICC
= 20 mA
SC 2804 S »
ICC
= 30 mA
SC 5004 P »
ICC
= 100 mA
SC 5008 S »
ICC
= 100 mA
Connexion “SGND“: signal masse
1) > 10 V commande de vitesse pas défini.
2) Les valeurs entre parenthèses sont valables pour les moteurs sans balais en fonctionnement sans capteur.
3) Pas disponible pour SC 5004 / SC 5008
4) 22 kΩ (SC 1801, SC 2402, SC 2804)
47 kΩ (SC 5004, SC 5008)
Un résistance externe pull-up peut être ajouté pour améliorer le temps de montée.
Attention:
Iout
max. 15 mA ne doit pas être dépassé.
5) Les valeurs s’appliquent aux moteurs 2-pôles. Les valeurs indiquées sont doublés pour les moteurs 4-pôles.
6) Avec le matériel approprié
© DR. FRITZ FAULHABER GMBH & CO. KG
Sous réserve de modifications.
Pour les indications concernant durée de vie ainsi que les données
techniques complémentaires voir „Informations techniques”.
Page 3/6
Informations pour connexions (générale)
Description des connexions (selon le type de moteur)
Moteurs C.C. Moteurs C.C.
Moteurs C.C. Moteurs C.C. Moteurs C.C.
sans
avec codeur
sans balais
avec
sans balais
avec
sans
balais avec balais avec cap-
capteurs de Hall codeur absolu teurs
Hall digitale
digitale
+ codeur + brake/enable
Connexion “Mot A“, “Mot B“, “Mot C“:
– Connexion moteur Mot A Mot + Phase A Phase A Phase A Phase A
Mot B Mot - Phase B Phase B Phase B Phase B
Mot C réservé Phase C Phase C Phase C Phase C
Connexion “Sens A“, “Sens B“, “Sens C“:
– Entrée capteur Sens A réservé Capteur Hall A DATA Capteur Hall A Capteur Hall A
Sens B codeur canal A Capteur Hall B réservé Capteur Hall B Capteur Hall B
Sens C codeur canal B Capteur Hall C CLK Capteur Hall C Capteur Hall C
f ≤ 400 kHz
Connexion „IO1“, „IO2“
- entrée logique IO1 réservé réservé réservé codeur B brake
IO2 réservé réservé réservé codeur A enable
SC fonction
www.faulhaber.com

Edition 2017
MOSFET
SGND
Hallsensor A
Hallsensor B
RS
P
nsoll
DIR
U
GND
Umot
UFG
Hallsensor C
Phase A
Phase B
Phase C
Vcc
+5V
Iist
Ua
nsoll
ϕ(t)
5 ...18 V 0 ...10 V
12 V 12 V
Mot C
Mot B
Mot A
SGND
VCC
Sens C
Sens B
Sens A
(IO 1)
(IO 2)
FG SC 1801
SC 2402
SC 2804
SC 5004
SC 5008
DIR
Unsoll
GND
Umot
UP
Motor +
Motor –
Mot C
Mot B
Mot A
SGND
VCC
Sens C
Sens B
Sens A
(IO 1)
(IO 2)
FG SC 1801
SC 2402
SC 2804
SC 5004
SC 5008
DIR
Unsoll
GND
Umot
UP
GND
Kanal B
Kanal A
+5V (Versorgung)
DC-Motor
Motor +
Motor – DC-Motor
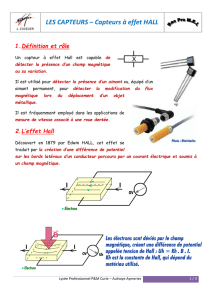
Schéma - moteur sans balais avec capteurs Hall (option 3530)
Protection:
Elévation de
température
Calcul de
la position
du rotor
I2t-
Limitation
du courant
Entrée
sens de rotation
Entrée
de consigne
0 ... 10 V
Réglage 5V
Power
amplifier
Evaluation
sens de
rotation
Moteur
sans
balais
Alimentation
éléctronique
Alimentation
moteur
22k
PWM
Commutateur
triphasée
22k
© DR. FRITZ FAULHABER GMBH & CO. KG
Sous réserve de modifications.
Pour les indications concernant durée de vie ainsi que les données
techniques complémentaires voir „Informations techniques”.
Page 4/6
Régulateur Pl
de la vitesse
Calcul de
la vitesse
Sortie
défaut
Microrégulateur
Capteur Hall
Capteur Hall
Capteur Hall
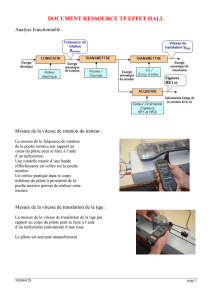
Exemple de raccordement alimentation
Opération de commande
Opération de contrôle
Commande de vitesse
par Umot
Contrôle de vitesse
par Unsoll
Contrôleur de mouvement
Platine d‘adaptation
(en option)
Configuration
z.B. z.B.
Exemple de raccordement pour micromoteurs C.C. avec codeur
Contrôleur de vitesse
avec codeur
(alimentation)
Moteur C.C.
www.faulhaber.com

Phase A
Phase B
Phase CMot C
Mot B
Mot A
SGND
VCC
Sens C
Sens B
Sens A
(IO 1)
(IO 2)
FG SC 1801
SC 2402
SC 2804
SC 5004
SC 5008
DIR
Unsoll
GND
Umot
UP
GND
Hall C
Hall B
Hall A
+5V (Versorgung)
BL-Motor
Phase A
Phase B
Phase C
BL-Motor
Phase A
Phase B
Phase C
Kanal A
Kanal BMot C
Mot B
Mot A
SGND
VCC
Sens C
Sens B
Sens A
FG
Kanal B
Kanal A
SC 2402
SC 2804
SC 5004
SC 5008
DIR
Unsoll
GND
Umot
UP
GND
Hall C
Hall B
Hall A
+5V (Versorgung)
BL-Motor
Edition 2017
0 ...10 V
12 V
Mot C
Mot B
Mot A
SGND
VCC
Sens C
Sens B
Sens A
Brake
Enable
FG SC 2402
SC 2804
SC 5004
SC 5008
DIR
Unsoll
GND
Umot
UP
Phase A
Phase B
Phase C
GND
Hall C
Hall B
Hall A
+5V (Versorgung)
BL-Motor
Hall C
Hall B
Hall A
Exemple de raccordement pour servomoteurs C.C. sans balais avec capteurs Hall
Exemple de raccordement pour servomoteurs C.C. sans balais avec capteurs Hall digitale et Brake / Enable
Exemple de raccordement pour servomoteurs C.C. sans balais avec capteurs Hall digitale et codeur
Contrôleur de vitesse
Contrôleur de vitesse
Contrôleur de vitesse
avec capteurs
Hall
avec capteurs
Hall digital et
codeur IE2
avec capteurs
Hall digital
Moteur C.C.
sans balais
Moteur C.C.
sans balais
Moteur C.C.
sans balais
(alimentation)
(alimentation)
(alimentation)
Canal B
Canal B
Canal A
Canal A
© DR. FRITZ FAULHABER GMBH & CO. KG
Sous réserve de modifications.
Pour les indications concernant durée de vie ainsi que les données
techniques complémentaires voir „Informations techniques”.
Page 5/6
www.faulhaber.com
 6
6
1
/
6
100%