SUJETS DE TD Table des mati`eres Circuit RLC série 3 Circuit LC

Licence 3 IST
Signaux et syst`
emes lin´
eaires
SUJETS DE TD
Table des mati`
eres
Circuit RLC s´erie 3
Circuit LC s´erie 3
Circuit RLC s´erie 4
Circuit RLC s´erie 4
Oscillations d’une masse 5
Base de Fourier 6
Famille d’exponentielles r´eelles 6
Signaux de Rademacher 7
Famille des sinus cardinaux d´ecal´es 7
Orthonormalisation de Gram-Schmidt 8
D´ecomposition en cosinus discret 8
Famille de cosinus 9
Deux calculs de convolutions simples 10
Convolution de sinus cardinaux 10
´
Etude d’un filtre d´erivateur `a temsp discret 11
´
Etude d’un filtre d´erivateur `a temps discret 11
´
Etude d’un filtre int´egrateur `a temps discret 12
´
Etude d’un filtre moyenneur `a temps discret 12
S´eries de Fourier et d´erivation 12
S´erie de Fourier et redresseur 13
S´erie de Fourier de cr´eneaux carr´es 13
S´erie de Fourier de cr´eneaux triangulaires 14
Corde vibrante 14
Conduction de chaleur dans un milieu fini 16
Transform´ee de Fourier des doubles exponentielles 17
Transform´ee de Fourier des exponentielles monolat`eres 18
Transform´ee de Fourier de fr´equences pures observ´ees sur un horizon fini 18
Transform´ee de Fourier des gaussiennes 19
Syst`eme Radar 19
´
Etalement spectral/temporel. In´egalit´e de Heisenberg 20
Conduction de chaleur dans un milieu infini 21
Quizz des transform´ee de Fourier 23
Un peu d’optique : diffraction `a l’infini et interf´erences 23
Transform´ee de Fourier des doubles exponentielles (`a temps discret) 25
Transform´ee de Fourier de fr´equences pures observ´ees sur un horizon fini (`a temps discret) 25
Erreur d’interpolation et filtre anti-repliement 26
M. Kowalski 1

Signaux et syst`
emes lin´
eaires Sujets de TD
Algorithme de transform´ee de Fourier rapide 26
Transform´ee en Z de la double exponentielle `a temps discret 28
Transform´ee en Z inverse d’une fraction rationnelle d’ordre 1 28
Transform´ee en Z inverse d’une fraction rationnelle d’ordre 2 28
´
Etude d’un filtre donn´e par sa fonction de transfert en z29
´
Etude d’un filtre donn´e par sa fonction de transfert en z29
´
Etude d’un filtre donn´e son transfert en z29
Transform´ee en Z de la fonction porte `a temps discret 29
Sous ´echantillonnage – Interpolation – transform´ee en Z 30
Filtre tout pˆole d’ordre 1 31
´
Equation diff´erentielle et transform´ee de Laplace 31
Transform´ee de Laplace de la double exponentielle 32
Circuit RC et transform´ee de Laplace 32
Transform´ee de Laplace bilat´erale de la fonction porte 33
Transform´ee de Laplace inverse d’une fraction rationnelle d’ordre 1 33
Transform´ee de Laplace des exponentielles g´en´eralis´ees tronqu´ees 33
Transform´ee de Laplace inverse d’une fraction rationnelle d’ordre 2 34
2

Signaux et syst`
emes lin´
eaires Sujets de TD
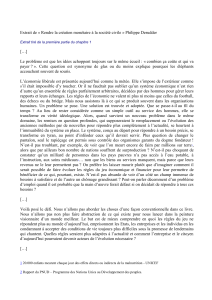
Exercice 1. —Circuit RLC s´erie.
On travaille avec le circuit RLC s´erie donn´e sur la figure suivante, `a gauche. Les composants sont
suppos´es parfaits. On l’analyse sous forme entr´ee–sortie, comme indiqu´e sur le sch´ema de droite :
l’entr´ee e(t) est la tension v(t) aux bornes du circuit et la sortie est s(t) l’intensit´e qui traverse le
circuit i(t).
Signaux et systèmes linéaires 2
Exercice 1 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LRC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
Déterminez l’équation différentielle qui relie e(t)et s(t).
Exercice 2 —Circuit LC série. On travaille avec le circuit LC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
1.
Déterminez l’équation différentielle qui relie
e(t)
et
s(t)
.
2.
Montrez qu’il s’agit d’un système linéaire et invariant.
3.
Solutions libres. Le circuit est supposé ouvert pour
t<0
et à l’instant
t=0
on le met en court
circuit. Déterminez la sortie
s(t),t ∈
.Dansquelleconditionphysiquelesignal
s(t)
est-il non
nul ?
4.
Solutions forcées. Le circuit est supposé forcé à
v(t)=v0cos [2πft+ϕ]
,pour
t∈+
et ouvert
avant. Déterminez la sortie
s(t)
.
Exercice 3 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension totale v(t)aux bornes du circuit et la sortie s(t)est la tension aux bornes
de la bobine vL(t).
Jean-François Giovannelli Sujets de travaux dirigés
Signaux et systèmes linéaires 2
Exercice 1 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LRC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
Déterminez l’équation différentielle qui relie e(t)et s(t).
Exercice 2 —Circuit LC série. On travaille avec le circuit LC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
1.
Déterminez l’équation différentielle qui relie
e(t)
et
s(t)
.
2.
Montrez qu’il s’agit d’un système linéaire et invariant.
3.
Solutions libres. Le circuit est supposé ouvert pour
t<0
et à l’instant
t=0
on le met en court
circuit. Déterminez la sortie
s(t),t ∈
.Dansquelleconditionphysiquelesignal
s(t)
est-il non
nul ?
4.
Solutions forcées. Le circuit est supposé forcé à
v(t)=v0cos [2πft+ϕ]
,pour
t∈+
et ouvert
avant. Déterminez la sortie
s(t)
.
Exercice 3 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension totale v(t)aux bornes du circuit et la sortie s(t)est la tension aux bornes
de la bobine vL(t).
Jean-François Giovannelli Sujets de travaux dirigés
(1) D´eterminez l’´equation diff´erentielle qui relie e(t) et s(t).
(2) Montrez qu’il s’agit d’un syst`eme lin´eaire.
(3) Montrez qu’il est en plus invariant.
(4) Solutions libres. Le circuit est suppos´e ouvert pour t < 0 et `a l’instant t= 0 on le met
en court circuit. D´eterminez la sortie s(t), t ∈R. Le signal s(t) est-il un signal causal,
p´eriodique, stable, d’´energie finie ?
(5) Solutions forc´ees. Le circuit est suppos´e forc´e `a v(t) = v0cos(2πft +ϕ), pour t∈R+.
D´eterminez la sortie s(t). Le signal s(t) est-il un signal causal, p´eriodique, stable, d’´energie
finie ?
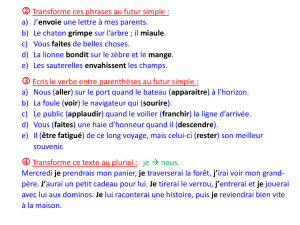
Exercice 2. —Circuit LC s´erie.
On travaille avec le circuit LC s´erie donn´e sur la figure suivante, `a gauche. Les composants sont
suppos´es parfaits. On l’analyse sous forme entr´ee–sortie, comme indiqu´e sur le sch´ema de droite :
l’entr´ee e(t) est la tension v(t) aux bornes du circuit et la sortie est s(t) l’intensit´e qui traverse le
circuit i(t).
Signaux et systèmes linéaires 2
Exercice 1 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LRC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
Déterminez l’équation différentielle qui relie e(t)et s(t).
Exercice 2 —Circuit LC série. On travaille avec le circuit LC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
1.
Déterminez l’équation différentielle qui relie
e(t)
et
s(t)
.
2.
Montrez qu’il s’agit d’un système linéaire et invariant.
3.
Solutions libres. Le circuit est supposé ouvert pour
t<0
et à l’instant
t=0
on le met en court
circuit. Déterminez la sortie
s(t),t ∈
.Dansquelleconditionphysiquelesignal
s(t)
est-il non
nul ?
4.
Solutions forcées. Le circuit est supposé forcé à
v(t)=v0cos [2πft+ϕ]
,pour
t∈+
et ouvert
avant. Déterminez la sortie
s(t)
.
Exercice 3 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension totale v(t)aux bornes du circuit et la sortie s(t)est la tension aux bornes
de la bobine vL(t).
Jean-François Giovannelli Sujets de travaux dirigés
Signaux et systèmes linéaires 2
Exercice 1 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LRC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
Déterminez l’équation différentielle qui relie e(t)et s(t).
Exercice 2 —Circuit LC série. On travaille avec le circuit LC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
1.
Déterminez l’équation différentielle qui relie
e(t)
et
s(t)
.
2.
Montrez qu’il s’agit d’un système linéaire et invariant.
3.
Solutions libres. Le circuit est supposé ouvert pour
t<0
et à l’instant
t=0
on le met en court
circuit. Déterminez la sortie
s(t),t ∈
.Dansquelleconditionphysiquelesignal
s(t)
est-il non
nul ?
4.
Solutions forcées. Le circuit est supposé forcé à
v(t)=v0cos [2πft+ϕ]
,pour
t∈+
et ouvert
avant. Déterminez la sortie
s(t)
.
Exercice 3 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension totale v(t)aux bornes du circuit et la sortie s(t)est la tension aux bornes
de la bobine vL(t).
Jean-François Giovannelli Sujets de travaux dirigés
(1) D´eterminez l’´equation diff´erentielle qui relie e(t) et s(t).
(2) Montrez qu’il s’agit d’un syst`eme lin´eaire et invariant.
3

Signaux et syst`
emes lin´
eaires Sujets de TD
(3) Solutions libres. Le circuit est suppos´e ouvert pour t < 0 et `a l’instant t= 0 on le met en
court circuit. D´eterminez la sortie s(t), t ∈R. Dans quelle condition physique le signal s(t)
est-il non nul ?
(4) Solutions forc´ees. Le circuit est suppos´e forc´e `a v(t) = v0cos(2πft +ϕ), pour t∈R+et
ouvert avant. D´eterminez la sortie s(t).
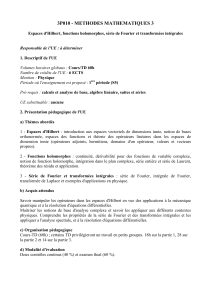
Exercice 3. —Circuit RLC s´erie.
On travaille avec le circuit RLC s´erie donn´e sur la figure suivante, `a gauche. Les composants sont
suppos´es parfaits. On l’analyse sous forme entr´ee–sortie, comme indiqu´e sur le sch´ema de droite :
l’entr´ee e(t) est la tension v(t) aux bornes du circuit et la sortie est s(t) l’intensit´e qui traverse le
circuit i(t).
Signaux et systèmes linéaires 3
L
R
C
!
!
vL(t)
v(t)H
−−−−−−−→ −−− −−−−→
e(t)s(t)
1.
Déterminez l’équation différentielle qui relie
e(t)
et
s(t)
.
2.
Caractéristique du système.
2a.
Démontrez qu’il s’agit d’un système linéaire.
2b.
Démontrez qu’il est en plus invariant.
3.
Réponse indicielle. Le circuit est supposé ouvert pour
t<0
et à l’instant
t=0
on impose une
tension constante
v(t)=v0
.
3a.
Que vaut
e(t),t ∈
?Déterminezlasortie
s(t),t∈
.
3b.
Le signal
s(t)
est-il un signal causal, périodique, stable, d’énergie finie?
4.
Solutions forcées. Le circuit est supposé forcé à
v(t)=v0cos [2πft+ϕ]
,pour
t∈
.
4a.
Déterminez la sortie
s(t)
.
4b.
Le signal
s(t)
est-il un signal causal, périodique, stable, d’énergie finie?
Exercice 4 —Oscillations d’une masse. On étudie le dispositif présenté sur la figure suivante à gauche. La
masse mse déplace sur un axe Ox et on repère sa position à tout instant par x(t).Elleestsoumiseàplusieurs
forces : l’action d’un ressort de raideur k,uneforcedefrottementfluide−→ff=−h−→v,h>0où −→vest la vitesse
et une force extérieure connue −→fe(t).
On cherche à décrire le comportement de ce système sous la forme du schéma présenté sur la partie droite
de la figure : l’entrée e(t)est la valeur algébrique de la force extérieure −→fe(t)et la sortie est la position de la
masse x(t).
Jean-François Giovannelli Sujets de travaux dirigés
Signaux et systèmes linéaires 2
Exercice 1 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LRC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
Déterminez l’équation différentielle qui relie e(t)et s(t).
Exercice 2 —Circuit LC série. On travaille avec le circuit LC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
1.
Déterminez l’équation différentielle qui relie
e(t)
et
s(t)
.
2.
Montrez qu’il s’agit d’un système linéaire et invariant.
3.
Solutions libres. Le circuit est supposé ouvert pour
t<0
et à l’instant
t=0
on le met en court
circuit. Déterminez la sortie
s(t),t ∈
.Dansquelleconditionphysiquelesignal
s(t)
est-il non
nul ?
4.
Solutions forcées. Le circuit est supposé forcé à
v(t)=v0cos [2πft+ϕ]
,pour
t∈+
et ouvert
avant. Déterminez la sortie
s(t)
.
Exercice 3 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension totale v(t)aux bornes du circuit et la sortie s(t)est la tension aux bornes
de la bobine vL(t).
Jean-François Giovannelli Sujets de travaux dirigés
(1) D´eterminez l’´equation diff´erentielle qui relie e(t) et s(t).
(2) Caract´eristiques du syst`eme.
(a) Montrez qu’il s’agit d’un syst`eme lin´eaire.
(b) Montrez qu’il est en plus invariant.
Exercice 4. —Circuit RLC s´erie.
On travaille avec le circuit RLC s´erie donn´e sur la figure suivante, `a gauche. Les composants sont
suppos´es parfaits. On l’analyse sous forme entr´ee–sortie, comme indiqu´e sur le sch´ema de droite :
l’entr´ee e(t) est la tension totale v(t) aux bornes du circuit et la sortie s(t) est la tension aux bornes
de la bobine vL(t).
(1) D´eterminez l’´equation diff´erentielle qui relie e(t) et s(t).
(2) Caract´eristiques du syst`eme.
4

Signaux et syst`
emes lin´
eaires Sujets de TD
Signaux et systèmes linéaires 3
L
R
C
!
!
vL(t)
v(t)H
−−−−−−−→ −−− −−−−→
e(t)s(t)
1.
Déterminez l’équation différentielle qui relie
e(t)
et
s(t)
.
2.
Caractéristique du système.
2a.
Démontrez qu’il s’agit d’un système linéaire.
2b.
Démontrez qu’il est en plus invariant.
3.
Réponse indicielle. Le circuit est supposé ouvert pour
t<0
et à l’instant
t=0
on impose une
tension constante
v(t)=v0
.
3a.
Que vaut
e(t),t ∈
?Déterminezlasortie
s(t),t∈
.
3b.
Le signal
s(t)
est-il un signal causal, périodique, stable, d’énergie finie?
4.
Solutions forcées. Le circuit est supposé forcé à
v(t)=v0cos [2πft+ϕ]
,pour
t∈
.
4a.
Déterminez la sortie
s(t)
.
4b.
Le signal
s(t)
est-il un signal causal, périodique, stable, d’énergie finie?
Exercice 4 —Oscillations d’une masse. On étudie le dispositif présenté sur la figure suivante à gauche. La
masse mse déplace sur un axe Ox et on repère sa position à tout instant par x(t).Elleestsoumiseàplusieurs
forces : l’action d’un ressort de raideur k,uneforcedefrottementfluide−→ff=−h−→v,h>0où −→vest la vitesse
et une force extérieure connue −→fe(t).
On cherche à décrire le comportement de ce système sous la forme du schéma présenté sur la partie droite
de la figure : l’entrée e(t)est la valeur algébrique de la force extérieure −→fe(t)et la sortie est la position de la
masse x(t).
Jean-François Giovannelli Sujets de travaux dirigés
Signaux et systèmes linéaires 2
Exercice 1 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LRC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
Déterminez l’équation différentielle qui relie e(t)et s(t).
Exercice 2 —Circuit LC série. On travaille avec le circuit LC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension v(t)aux bornes du circuit et la sortie est s(t)l’intensité qui traverse le
circuit i(t).
!
v(t)
"
i(t)
LC
H
−−−−−−−→ −−− −−−−→
e(t)s(t)
1.
Déterminez l’équation différentielle qui relie
e(t)
et
s(t)
.
2.
Montrez qu’il s’agit d’un système linéaire et invariant.
3.
Solutions libres. Le circuit est supposé ouvert pour
t<0
et à l’instant
t=0
on le met en court
circuit. Déterminez la sortie
s(t),t ∈
.Dansquelleconditionphysiquelesignal
s(t)
est-il non
nul ?
4.
Solutions forcées. Le circuit est supposé forcé à
v(t)=v0cos [2πft+ϕ]
,pour
t∈+
et ouvert
avant. Déterminez la sortie
s(t)
.
Exercice 3 —Circuit RLC série. On travaille avec le circuit RLC série donné sur la figure suivante, à gauche.
Les composants sont supposés parfaits. On l’analyse sous forme entrée–sortie, comme indiqué sur le schéma
de droite : l’entrée e(t)est la tension totale v(t)aux bornes du circuit et la sortie s(t)est la tension aux bornes
de la bobine vL(t).
Jean-François Giovannelli Sujets de travaux dirigés
(a) D´emontrez qu’il s’agit d’un syst`eme lin´eaire.
(b) D´emontrez qu’il est en plus invariant.
(3) R´eponse indicielle. Le circuit est suppos´e ouvert pour t < 0 et `a l’instant t= 0 on impose
une tension constante v(t) = v0.
(a) Que vaut e(t), t ∈R? D´eterminez la sortie s(t), t ∈R.
(b) Le signal s(t) est-il un signal causal, p´eriodique, stable, d’´energie finie ?
(4) Solutions forc´ees. Le circuit est suppos´e forc´e `a v(t) = v0cos(2πft +ϕ), pour t∈R.
(a) D´eterminez la sortie s(t).
(b) Le signal s(t) est-il un signal causal, p´eriodique, stable, d’´energie finie ?
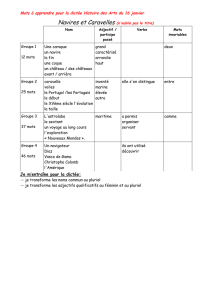
Exercice 5. —Oscillations d’une masse.
On ´etudie le dispositif pr´esent´e sur la figure suivante `a gauche. La masse mse d´eplace sur un
axe Ox et on rep`ere sa position `a tout instant par x(t). Elle est soumise `a plusieurs forces : l’action
d’un ressort de raideur k, une force de frottement fluide −→
ff=−h−→
v , h > 0 o`u −→
vest la vitesse et
une force ext´erieure connue −→
fe(t).
On cherche `a d´ecrire le comportement de ce syst`eme sous la forme du sch´ema pr´esent´e sur la
partie droite de la figure : l’entr´ee e(t) est la valeur alg´ebrique de la force ext´erieure −→
fe(t) et la
sortie est la position de la masse x(t).
(1) D´eterminez l’´equation diff´erentielle qui relie e(t) et s(t).
(2) Caract´eristiques du syst`eme.
(a) Montrez qu’il s’agit d’un syst`eme lin´eaire.
(b) Montrez qu’il est en plus invariant.
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
1
/
34
100%