dynamique oceanique

DYNAMIQUE OCÉANIQUE
Alain Colin de Verdière

Table des matières page
1
Table des matières
I – La dynamique des fluides géophysiques appliquée à l’océan ....................... 1
1. Historique et nécessité............................................................................................. 1
2. Scaling et adimensionalisation.............................................................................. 3
II – Les équations de la Mécanique des fluides ......................................................... 6
1. Physique des fluides ................................................................................................. 6
2. Statique des fluides .................................................................................................. 9
3. Cinématique ........................................................................................................... 13
1) Description Lagrangienne ........................................................................................ 13
2) Description Eulérienne............................................................................................. 13
3) Dérivée matérielle.................................................................................................... 14
4) Volume de contrôle – Surface de contrôle – Conservation de la masse..................... 14
5) Flot incompressible.................................................................................................. 16
4. Le modèle d’Euler .................................................................................................. 17
5. Les équation de Navier Stokes ............................................................................ 23
III – Rotation...................................................................................................................... 29
1. Les forces introduites par la rotation .................................................................. 29
2. Statique des fluides en rotation – Forme de la terre....................................... 32
3. Accélération de Coriolis ....................................................................................... 34
4. Le théorème de Taylor-Proudmann-Poincaré ................................................. 35
5. Approximations sur la sphère............................................................................... 37
6. Applications pratiques de la géostrophie ........................................................ 41
7. Rôle des termes inertiels........................................................................................ 47

1
I – La dynamique des fluides géophysiques appliquée à l’océan
1. Historique et nécessité
Les observations des océans remontent à la nuit des temps mais dès qu’elles
apparaissent se posent immédiatement les questions sur l’origine du comportement observé.
Pas besoin de beaucoup d’équipement pour mesurer sur une plage la variation du niveau de la
mer et réaliser que l’oscillation principale est à la période semi-diurne mais il aura quand
même fallu attendre le XVIIème siècle de Newton pour comprendre l’origine de l’oscillation,
c'est-à-dire son forçage et sa période et un siècle de plus pour que Laplace mette en place le
modèle en eau peu profonde des ondes de gravité pour rendre compte de la propagation des
marées.
On pourrait croire que la dynamique des vagues est connue depuis plus longtemps
encore mais non Airy et Stokes au XIXème siècle seulement ont proposé la dynamique qui
rendait compte de leurs propriétés dispersives (les ondes longues se propagent plus vite que
les ondes courtes). Vagues et marées s’observent de la terre et il a fallu attendre les progrès de
la navigation maritime pour commencer à dessiner des cartes de courants de surface. Si un
navire part du point A pour atteindre B mais se retrouve au bout d’un temps Δt en C, le
déplacement de l’eau est simplement le vecteur:
BC = AC – AB
et en divisant BC par Δt on obtient la vitesse du courant (mesuré en nœud ou mille
nautique/heure). L’opération ci-dessus n’est possible que si les positions A et C du navire sont
déterminées mais pour cela il fallut attendre le développement des premiers chronomètres de
marine pour garder le temps à la précision nécessaire (quelques secondes près) au bout d’un
mois de traversée (l’œuvre de l’horloger anglais Harrison). Cette opération répétée des
centaines de fois par les navires de commerce entre l’Europe et les Etats-Unis permettra de
moyenner les observations de courants instantanées dans un petit carré de longitude et latitude
données et de faire apparaître le Gulf Stream difficilement à rater compte tenu de ses courants
de 2-3 nœuds (sur 24 heures, |BC| vaut alors 50 à 75 mille nautique).
Il y a bien sur aussi les bouteilles à la mer mais leurs observations se bornent à
donner un point de départ et un point d’arrivée pour une bouteille. On ne sait pas où elle est
passée entre temps et le temps mis pour dériver dépend de la chance d’un promeneur. Elles
sont probablement aussi plus sensibles au vent qu’au courant et le message est sans doute plus
important que le voyage mais quelque part elles intègrent les mouvements de l’océan et de
l’atmosphère sur de grandes distances.
Ce n’est qu’au début du XXème siècle que l’on commence à dérouler des câbles pour
aller observer ce qui se passe sous la surface de la mer. En mesurant la température, on y
trouve des eaux très froides. Si on est dans les Tropiques où les eaux de surface sont chaudes,
c’est le premier indice d’une circulation latérale en profondeur ramenant des eaux dont
l’origine est aux pôles.
Les premiers enregistrements directs de courant avec des instruments accrochés à des
câbles ancrés au fond datent du début des années 70. La surprise est forte : les courants
varient erratiquement sur des échelles de temps de l’ordre de la semaine à quelques mois. Au

2
même moment, l’acoustique permet de localiser des objets sous la surface. Si on lâche un
flotteur en profondeur qui émet un son basse fréquence (autour de 200 Hz) à un temps t0
donné, la réception de ce son sur plusieurs balises fixes de position connue à des temps ti
permet de déterminer la distance du flotteur à ces balises C (ti – t0) où C la vitesse du son dans
l’eau vaut environ 1500 m s-1. On remonte ainsi à la position du flotteur et à son déplacement
si on fait cela régulièrement à sa trajectoire et où va le flotteur ? A peu près n’importe où ! Il y
a bien sûr toujours le Gulf Stream mais loin de cette structure les courants marins varient
énormément dans le temps et dans l’espace. Ca commence à ressembler à ce qui se passe dans
l’atmosphère et au temps (weather) dont la prédiction aux moyennes latitudes est notoirement
limitée. On s’est dit que ces mouvements étaient peut-être importants pour le climat et
suffisamment de fonds ont été investis dans les années 2000 pour lancer des flotteurs partout
dans l’océan mondial et lancer quelques satellites capables de balayer la surface de la mer en
quelques jours pour déterminer la hauteur de la surface océanique en chaque point.
Ainsi beaucoup de données sont disponibles aujourd’hui et s’accumulent
régulièrement dans des bases de données mais tout reste à faire ou presque pour « expliquer »
la dynamique de ce qu’il faut bien appeler la turbulence océanique. Est-ce que les modèles de
marée de Laplace sont une bonne base de départ ou au contraire, comme pour les vagues, les
mouvements sont-ils irrotationnels ? Mais pourquoi se poser ce type de questions puisque
depuis le milieu du XIXème siècle les équations de l’hydrodynamique sont connues sous le
nom d’équations de Navier-Stokes ? Utilisons simplement les équations de Navier-Stokes. Il y
a deux difficultés à un tel programme. La première est que leurs solutions sont impossibles à
trouver : on ne connaît de solutions mathématiques qu’à des situations d’écoulement très
simples loin de représenter des écoulements océaniques. La deuxième provient de
l’extraordinaire diversité des mouvements de l’eau, acoustique, vagues, marées, circulation
océanique, sillage d’un bateau, chutes du Niagara, mascaret dans un estuaire pour n’en citer
que quelques uns et pourtant tous solutions de l’équation de Navier-Stokes. Une même
équation pour régir cette profusion de comportements mais une équation impossible à
résoudre. La philosophie de l’approche « dynamique des fluides géophysiques » DFG (GFD
en anglais) est né de ce constat et elle se propose d’adapter les équations de Navier-Stokes au
phénomène particulier auquel on s’intéresse. « Adapter » veut dire enlever les petits termes
dans les équations en espérant que ce soient aussi des petits termes dans les solutions des
équations complètes. C’est une réponse pragmatique de physiciens contemplant la paroi
glacée des équations de Navier-Stokes dont la généralité même apparaît comme un handicap
pour comprendre la dynamique d’un phénomène particulier. Mais si au contraire on
s’intéresse aux prédictions, c'est-à-dire si je connais l’état de l’Atlantique en 1990 et que je
cherche son futur disons en 2100, ce handicap de la généralité devient un avantage. Tout au
moins dans un premier temps. Je discrétise mon Atlantique le plus finement possible et je
mets toutes les conditions aux limites nécessaires aux opérateurs différentiels et j’utilise
l’équation de Navier-Stokes pour coupler les variables à prédire à chaque maille du domaine.
En bref le même code va me permettre d’introduire tous les phénomènes que je pense
nécessaire à la prédiction. C’est conceptuellement très satisfaisant. Oui mais … première
difficulté : si on force un système, il faut quelque part aussi dissiper l’énergie. Le problème
est que la dissipation se fait à des échelles centimétriques dans l’océan. Sur la largeur de
l’Atlantique, disons 5000 km, j’ai 5 108 cotés de 1 cm. Ca fait beaucoup et l’initialisation va
exiger d’avoir les variables des équations sur chacune des petites boites de 1 cm de coté. Il
faut donc faire des boites plus grandes disons 10 km (ça dépend de la machine à sa
disposition) mais du coup il faut inventer les comportements du fluide entre 10 km et 1 cm.
Supposons que l’on ait correctement imaginé ce qui se passe la. Reste la deuxième difficulté
d’avoir les variables de l’état initial tous les 10 km. L’origine de la difficulté n’est pas
technologique mais conceptuelle. En effet l’hydrodynamique de l’océan est non linéaire et de

3
multiples instabilités sont présentes. Du coup une petite erreur sur une variable croit
exponentiellement dans le temps : l’océan est chaotique au sens de Lorenz, de petites
variations de l’état initial induisant rapidement des divergences immenses entre états prédits
et observations réelles. Dans l’atmosphère le temps de doublement des erreurs est de 2 jours,
probablement de l’ordre de 1 à 2 semaines pour l’océan et les prédictions sont impossibles au
delà d’un horizon probablement de l’ordre du mois. Si on pense au 421, qui ne possède que 3x
(3 translations et 3 rotations) soit 18 degrés de liberté et est déjà un jeu de hasard, on se dit
que l’océan et son nombre infini de degrés de liberté va être une bien belle machine à
fabriquer du hasard. Laissons donc le problème infiniment complexe de la prédiction de coté
et concentrons nous sur les observations et l’hydrodynamique qui sous tend ces observations.
Dans ce cours DFG, observations, méthodes d’approximations et compréhension
physique des phénomènes sont étroitement imbriquées. Pour un phénomène observé
d’échelles spatiales et temporelles données, il s’agira de :
A. Identifier des petits termes par rapport à d’autres dans les équations de Navier-
Stokes.
B. Négliger ces petits termes et de résoudre le système simplifié.
C. Vérifier la consistance de l’approximation où consistance signifie ici que l’on vérifie
avec la solution approchée que les termes négligés sont effectivement petits.
Au terme de ces trois étapes une compréhension physique du phénomène observé
doit se développer au point de pouvoir expliquer « comment cela marche ce truc ? »
2. Scaling et adimensionalisation
Lorsqu’on parle d’échelles spatiales et temporelles de quoi s’agit-il ? Les équations
de Navier-Stokes sont des équations aux dérivées partielles et donc trouver l’ordre de
grandeur de termes des équations passe par l’estimation de dérivées.
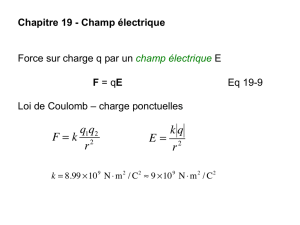
Imaginons le profil de vitesse
suivant u(x):
Si je prends la pente où la dérivée
est maximum, je définis l’échelle spatiale
L comme l’échelle où la vitesse u passe de
sa valeur maximale U à 0. C'est-à-dire
l’échelle de vitesse U est définie par :
U = max |u(x)|
et l’échelle spatiale L par : L =
dx
du
maxU
u
U
L
x
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
1
/
52
100%