Hackgyver - M1.06 - Transistor en commutation


SOMMAIRE
Transistor NPN ou PNP (en commutation)
Différence entre PNP et NPN
Commande en courant (Blocage - Saturation)
Comment placer le transistor en « saturation »
Calcul de la résistance
Application concrète !
Moteur a courant continu : quelle tension ?
Quel ampérage ? (a vide ? ; bloqué ?)
Commande manuel d’un moteur DC
Interconnexion avec la launchpad.
2

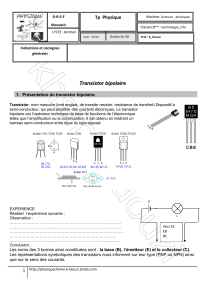
TRANSISTOR
Wikipedia :
Le transistor est un composant électronique actif
utilisé :
Comme interrupteur dans les circuits logiques ;
Comme amplificateur de signal ;
Pour stabiliser une tension, moduler un signal ainsi que de
nombreuses autres utilisations.
En résumé : le transistor permet de contrôler (piloter)
une charge avec un courant ou une tension.
La saturation est l’équivalent d’un interrupteur fermé.
Le blocage quant a lui, c’est l’interrupteur ouvert.
3

TRANSISTOR BIPOLAIRE NPN OU PNP
Différence entre PNP et NPN
il existe 2 types de transistor bipolaire : PNP ou NPN.
La différence provient de la polarisation des couches
de semi-conducteurs.
La direction de la flèche nous indique le type.
Base Base
Émetteur
Émetteur
Collecteur
Collecteur
4

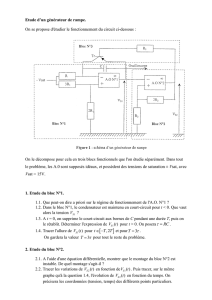
TRANSISTOR NPN (EXEMPLE DE
MONTAGE)
Pour basculer le transistor en commutation
:
Il faut une intensité suffisante pour saturer T1
Sans le « bruler »
On applique une tension positive entre J1 et GND. on contrôle l’intensité grâce
a R1.
Pour calculer cette intensité, il faut
connaitre :
L’intensité désiré dans la charge
La tension d’entrée.
Le « gain » du transistor (rapport entre le courant de base et le courant
traversant la charge et le transistor.)
5
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%