Chp.5 Normes

Normes
Prologue
Ce chapître introduit la notion générale de norme sur un espace vectoriel
quelconque. Grossièrement, une norme sur un espace vectoriel est une mesure
de la « taille de ses vecteurs. L’archétype en est la norme Euclidienne usuelle
de R2ou de R3qui mesure la distance entre deux points Aet Bdu plan ou de
l’espace : la « norme » du vecteur Ð→
AB .
Plus généralement, une « norme » sur un espace vectoriel Eest une fonction
à valeurs réelles qui associe à chaque élément de Eun réel positif, sa « norme »,
de façon à vérifier certaines propriétés naturelles imposées par l’idée intuitive
que l’on se fait d’une norme. Par exemple, une norme devra être homogène : si
on multiplie un vecteur quelconque par un facteur réel positif, on devra multi-
plier sa « taille », quelque soit la façon dont on la mesure, par ce même facteur.
De même, la norme de la somme de deux vecteurs devra toujours être au plus
égale à la somme de leurs normes respectives. Enfin, le seul vecteur de norme
nulle devra être le vecteur nul. Toute fonction définie sur un espace vectoriel
Equelconque, et à valeurs dans l’ensemble des réels positifs, vérifiant ces trois
propriétés élémentaires est une « norme » sur E.
Sur tout espace de dimension finie, il existe une infinité de normes. Parmi
elles, les normes Euclidiennes, associées à un produit scalaire sur E, rencontrées
au chapître 2, mais bien d’autres aussi, également utiles en pratique, comme les
normes Npsur Rn(1 ≤p≤+∞), ou la norme spectrale sur MR(n).
Le résultat essentiel de ce chapître est l’équivalence des normes définies sur
un même espace de dimension finie (Corollaire ??). Il permet le recours à une
norme quelconque pour établir la convergence d’une suite (Théorème 5.4.2), ou
vérifier le caractère borné d’une partie donnée (Théorème 5.4.3). Le chapître se
conclut par l’introduction des notions de fonction Lipschitzienne et de suite de
Cauchy , illustrées par le Théorème de contraction (Théorème 5.6.2), mais aussi
et surtout par celle de fonction coercive , essentielle en optimisation pour pallier
l’absence de compacité de l’ensemble admissible (Corollaire 5.6.1). Toute fonc-
tion quadratique dont la partie quadratique est DP, par exemple, est une fonction
coercive (Exercice 5.12), et donc atteint nécessairement son minimum sur toute
partie fermée, même non bornée, de l’espace sur lequel elle est définie.

106 CHAPITRE 5. NORMES
5.1 Normes sur un espace de dimension finie
Espaces normés
Définition 5.1.1 Un « espace normé » est le couple (E,N)formé par un espace
vectoriel E et une « norme » sur E , c’est-à-dire une fonction N ∶E↦[0,+∞[:
(N1)Homogène :
x∈E,λ∈R⇒N(λx)=λN(x)(5.1)
(N2)Sous-additive :
x,y∈E⇒N(x+y)≤N(x)+N(y)(5.2)
(N3)Jamais nulle en dehors du zéro de E :
N(x)=0⇒x=0E(5.3)
Toute norme Euclidienne sur un espace de dimension finie est une norme
au sens de la définition 5.1.1 : (5.2) est l’inégalité triangulaire (Proposition 2.2.2),
(5.1) et (5.3) résultent du fait que le carré de toute norme Euclidienne est une
forme quadratique DP (Définition 2.2.2). Mais il existe des normes usuelles non
Euclidiennes :
Exemple 5.1.1 La norme :
N∞∶Rn↦[0,+∞[∶x=(x1, .. ., xn)↦n
max
i=1xi
sur Rnn’est pas une norme Euclidienne : elle ne vérifie pas la règle du parallélo-
gramme (Proposition 2.2.4). Pour : n =2, par exemple :
N2
∞(1,1)+N2
∞(1,−1)=2≠2N2
∞(0,1)+2N2
∞(1,0)=4
Plus généralement, si B={e(1), ..., e(n)}est une base quelconque d’un es-
pace de dimension finie E, l’inverse de l’isomorphisme naturel :
ΛB∶Rn↦E∶(x1, .. ., xn)↦n
i=1
xie(i)
de Rnsur Eassocié à la base Bpermet de transporter sur Etoute norme donnée
sur Rn. En particulier :
N∞○Λ−1
B∶E↦[0,+∞[∶x=n
i=1
xie(i)↦n
max
i=1xi(5.4)
est une norme sur E. On utilise essentiellement cette norme lorsque Eest l’un
des espaces Rn,MR(n),Rn[x], où l’un de leurs sous-espaces, et Best la base
naturelle de E. En oubliant le formalisme « encombrant » de l’isomorphisme ΛB,
on notera alors systématiquement : « N∞» cette norme.

5.1. NORMES SUR UN ESPACE DE DIMENSION FINIE 107
Exemple 5.1.2 N∞∶MR(m,n)↦[0,+∞[∶A↦max
1≤i≤m
1≤j≤n
Aj
i
Proposition 5.1.1 Toute norme sur un espace de dimension finie E est une fonc-
tion continue de E dans R.
Preuve : Si B={e(1),.. .,e(n)}est une base de E:
N○x(k)−N(a) ≤N(x(k)−a)=n
i=1xi(k)N[e(i)]→0
dès que : x(k)=∑n
i=1xi(k)e(i)E
→a
Boules d’un espace normé
Définition 5.1.2 Dans tout espace normé (E,N), on appelle respectivement
« boule ouverte » et « boule fermée » centre c et de rayon r les ensembles :
BN(c,r)={x∈EN(x−c)<r},et : BN(c,r)={x∈EN(x−c)≤r}) (5.5)
tS’il parait naturel, dans l’espace Euclidien obtenu en munissant R3de son produit sca-
laire usuel, d’appeler « boule » l’ensemble des points dont la distance à un point donné
est inférieure à une valeur prescrite, la généralisation de ce terme au cas d’un espace
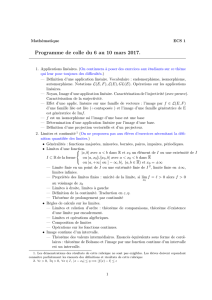
normé quelconque ne doit être comprise que comme une commodité de language.
Comme le montre la figure 5.1 en effet, toutes les boules sont loin d’être rondes .. .
Proposition 5.1.2 Toute boule ouverte ou fermée d’un espace normé quelconque
est un ensemble convexe.
Preuve : C’est une conséquence élémentaire de l’homogénéité et de la sous-
additivité de toute norme Npuisque, pour tout couple d’éléments xet yde la
boule ouverte (resp. fermée) de centre cet de rayon r, et tout réel tcompris entre
zéro et un :
N(c−t y −(1−t)x)=N(t(c−y)+(1−t)(c−x))≤...
.. . ≤N(t(c−y))+N(1−t)(c−x)) =t N(c−y)+(1−t)N(c−x)
donc :
0≤t≤1, x,y∈BN(c,r) (resp. x,y∈B(c,r)) ⇒.. .
. .. t x +(1−t)y∈B(c,r) (resp. B(c,r))
Toute boule ouverte ou fermée de rayon rcontient ainsi toute combinaison
convexe de deux quelconques de ses éléments, donc est une partie convexe
(Théorème 1.8.1).

108 CHAPITRE 5. NORMES
Fig. 5.1 – « Boule » B∞={(x1,x2)∈R2maxi=1xi≤1}de centre (0,0)
et de rayon un associée à la norme N∞dans R2.
Théorème 5.1.1 Dans tout espace normé (E,N)de dimension finie, toute boule
ouverte (resp. fermée) est un ouvert (resp. un fermé) de la topologie usuelle de E.
Preuve : C’est l’image réciproque de l’intervalle ouvert ]−∞,r[(resp. de l’in-
tervalle fermé ]−∞,r]) de Rpar la fonction :
f∶x∈EÀ
L
c−x∈EÀ
N
N(c−x)
continue comme composée d’une application linéaire donc continue (Théo-
rème 3.2.1) avec la norme (Proposition 5.1.1).
Corollaire 5.1.1 Dans tout espace normé de dimension finie :
1. Toute boule ouverte est l’intérieur de la boule fermée de même centre et de
même rayon.
2. Toute boule fermée de rayon strictement positif est l’adhérence de la boule
ouverte de même centre et de même rayon
Preuve : Soient Eun espace de dimension finie, Nune norme sur E,cun point
quelconque de E, et run réel quelconque. Le fait que la boule ouverte :
BN(c,r)={x∈EN(c−x)<r}
soit l’intérieur de la boule fermée :
BN(c,r)={x∈EN(x−c)≤r}

5.2. NORMES « NP» SUR RN109
est trivial si : r≤0. Dans ce cas, la boule ouverte est vide et la boule fermée vide
ou réduite (si r=0) au zéro de E. Sinon, tout point ade la « sphère :
SN={x∈EN(x−c)=r}
de centre cet de rayon rest limite des suites :
x(k)=(1−2−k)x, et : y(k)=(1+2−k)x
dont l’une est dans la boule ouverte BN(c,r), et l’autre dans le complémentaire
de la boule fermée BN(c,r). Tout point de SN(c,r)appartient donc à la fron-
tière de chacune de ces boules. Du théorème 5.1.1, il résulte alors facilement :
–SN(c,r)=∂BN(c,r)=∂BN(c,r)
–BN(c,r)=˚
BN(c,r), et : BN(c,r)=BN(c,r)
Théorème 5.1.2 Dans tout espace normé de dimension finie, toute boule fermée
est compacte.
Preuve : Puisque c’est une partie fermée (Théorème 5.1.1), il suffit de montrer
qu’elle est bornée (Corollaire 4.5.2). Tout espace de dimension finie peut être
muni d’une structure Euclidienne (Proposition 2.3.2), et la restriction de toute
norme Nsur EàE
{0E}est une fonction homogène de degré un, qui ne s’an-
nule jamais. Du théorème 4.5.3, il résulte l’existence d’une constante réelle :
α>0 telle que : x≠0E⇒αx≤N(x). Ainsi :
x∈BN(c,r)={x∈EN(x−c)≤r}⇒x≤c+x−c≤.. .
.. . ≤c+α−1N(x−c)=c+α−1r<+∞
d’où : sup
x∈BN(c,r)x≤c+α−1r<+∞
et donc BN(c,r)est bornée (Proposition 3.3.5).
5.2 Normes « Np» sur Rn
Définition 5.2.1 On dit que deux réels p et q strictement plus grands que un sont
« conjugués » lorsque :
1
p
+
1
q
=1 (5.6)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
1
/
30
100%