Montage et caractérisation d`un photodétecteur pour une détection

Montage et caractérisation d’un photodétecteur
pour une détection hétérodyne optique
Thomas Chalopin
Stage de L3
Formation Interuniversitaire de Physique - ENS
Responsables :
Pierre-François Cohadon et Leonhard Neuhaus
Laboratoire Kastler Brossel
Juillet 2014
Résumé
L’objet de ce stage est le développement d’une détection hétérodyne optique afin d’étudier
les modes de vibration au-delà de 10 GHz d’un cristal de CaF2. On commence par monter
un photodétecteur comportant une voie basse fréquence et une voie haute fréquence, avant
de caractériser chacune de ces voies. On utilise ensuite ce photodétecteur pour faire battre
deux lasers Nd : YAG entre eux, ce qui permet de terminer la caractérisation de la voie haute
fréquence du photodétecteur, puis de quantifier les fluctuations en fréquence des lasers. Ce pic
de battement est ensuite asservi à une fréquence fixe pour s’affranchir de ces fluctuations. On
conclut en testant la détection hétérodyne sur des bandes latérales générées par un modulateur
de phase.
Abstract
The goal of this internship is the development of an optical heterodyne detection to study
the vibration modes above 10 GHz of a CaF2crystal. We start with assembling a photodetector
containing both high and low frequency channels, before characterizing these channels. We
use this photodetector to produce a beat note between two Nd : YAG lasers, which ends the
characterization of the high frequency channel. We also use this beat note to quantify the
frequency fluctuations of the lasers. The beat note is then locked to a specific frequency to get
rid of these fluctuations. Finally, we test the heterodyne detection on sidebands produced by
a phase modulator.

Montage et caractérisation d’un photodétecteur pour une détection hétérodyne optique 1
Table des matières
1 Introduction 2
2 Photodétecteur : réalisation et caractérisation 2
2.1 Montageduphotodétecteur ........................................ 2
2.2 Voie DC et mesure de l’efficacité quantique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.3 VoieRFetmesuredushotnoise ..................................... 4
3 Battements optiques et caractérisation des lasers 6
3.1 Caractérisationdulaser .......................................... 6
3.2 Battementsoptiques ............................................ 6
3.3 Stabilitérelativedesdeuxlasers ..................................... 7
4 Asservissement de la fréquence de battement 8
4.1 Boucled’asservissement .......................................... 8
4.2 Gainetstabilité .............................................. 9
5 Détection hétérodyne : preuve de principe 11
5.1 Montageetbandeslatérales........................................ 11
5.2 Calibrationdumodulateur......................................... 11
5.3 Bruitdemesure............................................... 12
6 Conclusion 12

Montage et caractérisation d’un photodétecteur pour une détection hétérodyne optique 2
1 Introduction
J’ai effectué mon stage dans l’équipe Mesure et
Bruits Fondamentaux du Laboratoire Kastler Brossel.
Cette équipe s’intéresse aux effets fondamentaux des
bruits (bruit thermique, bruit quantique, etc.) dans des
mesures de grande précision. Mon stage portait plus par-
ticulièrement sur une expérience d’opto-mécanique, i.e.
l’étude du couplage entre la lumière et la matière.
L’objectif de mon stage était de concevoir une détec-
tion hétérodyne afin d’étudier les modes de résonance
d’un cristal de fluorure de calcium (CaF2). Le prin-
cipe de la détection hétérodyne est d’amener un signal à
haute fréquence vers une fréquence plus faible afin d’en
faciliter l’étude. Pour amener le signal à plus basse fré-
quence, il suffit de le mélanger au signal connu d’un os-
cillateur local. La fréquence du signal obtenu est alors la
différence de fréquence de l’oscillateur local et du signal
que l’on souhaite étudier. En effet, si l’on suppose que
le signal est de la forme Esigeiωsig tet l’oscillateur local
de la forme ELOeiωLOt, on détecte une intensité :
I=Isig +ILO + 2<hEsigE∗
LOei(ωsig −ωLO )ti(1.1)
L’intensité détectée se met ainsi sous la forme de la
somme d’un signal continu et d’un signal à la fréquence
ωsig −ωLO.
Dans notre cas, la détection hétérodyne se fait à
l’aide de deux lasers de même type, donc de fréquence re-
lativement proche. Le premier laser porte l’information
que l’on souhaite étudier, et en le faisant battre avec le
second laser, on amène cette information à une fréquence
de battement que l’on peut facilement détecter.
La détection hétérodyne est ainsi utilisée dans de
nombreux domaines. Ici, les modes mécaniques sont si-
tués vers 17 GHz, et le laboratoire ne disposait ni d’un
photodétecteur, ni d’un analyseur de spectre capable
d’atteindre cette gamme de fréquence, d’où le choix
d’une détection hétérodyne. Les modes mécaniques se-
ront ainsi amenés vers une fréquence de l’ordre du GHz.
Pour pouvoir détecter un signal à une telle fréquence,
on utilise un photodétecteur rapide que l’on a construit
et caractérisé (section 2). On l’utilise ensuite pour faire
battre deux lasers Nd:YAG (neodymium-doped yttrium
aluminium garnet) [1] entre eux (section 3). C’est ce si-
gnal de battement qui constitue le signal de la détection
hétérodyne. On en profite aussi pour caractériser la sta-
bilité en fréquence typique d’un Nd:YAG.
On se sert aussi de ce signal de battement pour as-
servir un laser sur l’autre (section 4), avant de tester la
détection hétérodyne sur un modulateur électro-optique
(section 5). Nous n’avons pas eu le temps de la tester
directement sur le cristal de CaF2.
Dans l’ensemble des expériences, les lasers utilisés
sont des Nd : YAG qui émettent à 1064.52(6) nm (ce ré-
sultat sera obtenu en section 3). Aussi, de nombreux
résultats (obtenus à l’analyseur de spectre) sont donnés
en dBm. On rappelle donc qu’il s’agit d’une mesure de
puissance : xmW = 10 log10(x) dBm.
2 Photodétecteur : réalisation et caractérisation
Les photodétecteurs sont des outils indispensables
à toute expérience d’optique. Les photodétecteurs sont
composés d’une photodiode (un dipôle qui délivre un
courant proportionnel à la puissance lumineuse qu’il re-
çoit) et d’un circuit électronique qui permet d’obtenir,
en sortie, une tension proportionnelle à la puissance lu-
mineuse. Pour nos expériences, nous avons besoin d’un
photodétecteur relativement rapide (qui peut détecter
des signaux à haute fréquence, de l’ordre du GHz), ce
qui est relativement cher à l’achat. Le photodétecteur
utilisé dans l’ensemble de nos expériences a donc été
construit au laboratoire.
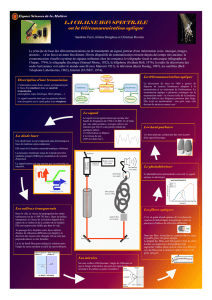
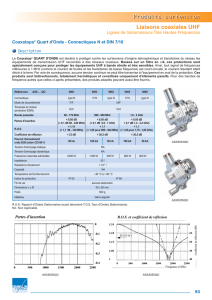
2.1 Montage du photodétecteur
Le photodétecteur que nous avons construit est lar-
gement inspiré de [2]. Le schéma du circuit est donné en
figure 2.1.
La photodiode utilisée est une photodiode Fermio-
nics FD150S2 [3]. Il s’agit d’une photodiode InGaAs (de
type PIN), dont la zone active a un diamètre de 150 µm.
Ce type de photodiode fonctionne très bien dans l’infra-
rouge, ce qui est bien le domaine des lasers utilisés.
L1
470 nH
L2
470 nH
R2
47 Ω
C2
55 nF
470 nF
6
+
3
−
2
7
4
Rfb
469 Ω
470 nF
470 nF
50 Ω
−5V
+5V+5V
RF
DC
LM6702
FD150S2
6
+
3
−
2
7
4
1 kΩ
22 pF
10 kΩ
R4
10 kΩ
2.2 Ω470 nF
2.2 Ω
470 nF
R7
10 kΩ
R11
1 kΩ
+15V
−15V
8
1
OP27Z
Fig 2.1 – Schéma du circuit électronique du photodétecteur
construit. Les résistances R7et R11 sont des poten-
tiomètres pour lesquelles les valeurs indiquées ne cor-
respondent pas aux valeurs effectives dans le circuit.

Montage et caractérisation d’un photodétecteur pour une détection hétérodyne optique 3
Ce montage permet en principe d’obtenir deux si-
gnaux : un signal DC (courant continu) et un signal que
l’on note RF (pour Radio Fréquence). Cette séparation
est effectuée par les bobines L1et L2(qui laissent pas-
ser la voie DC) et par le condensateur C2(voie RF).
Quelques modifications ont été effectuées par rapport
au photodétecteur de [2], en particulier l’ajout d’une bo-
bine supplémentaire L2en série avec L1. Cet ajout nous
a permis d’améliorer la bande passante de la voie RF
(que l’on va caractériser en détail en section 2.3).
La voie DC pourra être utilisée, après caractérisa-
tion, comme outil de détection et de mesure de puis-
sance lumineuse. La voie RF permettra d’effectuer une
détection hétérodyne.
2.2 Voie DC et mesure de l’efficacité
quantique
Nd :YAG
PD
Oscillo.
DC
200
100
YAG1
Légende
Mirroir
Lentille
λ/2
Cube
Bloqueur
Coupleur fibre
Isolateur optique
Densité réglable
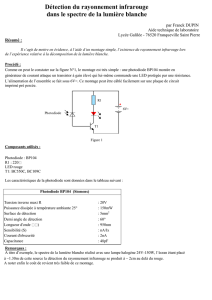
Fig 2.2 – Montage optique effectué pour caractériser la voie DC
de la photodiode. Les nombres désignent la distance
focale en mm des lentilles correspondantes.
Sur ce shéma j’ai indiqué l’ensemble du montage sur
lequel je me suis installé, et j’ai donc représenté cer-
tains faisceaux qui n’aboutissent pas (ce sont des
faisceaux utilisés dans d’autres expériences). Chaque
couple (cube, λ/2) permet de réguler la puissance lu-
mineuse en sortie du cube.
La voie DC comporte deux potentiomètres, R7et
R11.R7est un potentiomètre qui permet de régler
l’offset en sortie de l’amplificateur opérationnel (AO)
−on règle cet offset à0lorsque la photodiode n’est
pas éclairé. R11 permet de régler le gain du circuit, i.e.
le rapport Vout/iin, avec Vout la tension en sortie et iin
l’intensité du courant en entrée de l’AO.
On peut ensuite tester la voie DC en effectuant le
montage de la figure 2.2.
Pour que le montage soit efficace, il est nécessaire
de focaliser le faisceau laser sur la photodiode. Cette fo-
calisation est effectuée par la lentille de focale 100 mm
placée avant le photodétecteur. Pour vérifier que le fais-
ceau est correctement focalisé, on commence par vérifier
que l’on est bien placé sur son waist (il suffit de dépla-
cer le photodétecteur sur l’axe du faisceau, noté z, et de
constater que l’on est sur un maximum d’intensité). On
peut ensuite effectuer un balayage selon xou selon y.
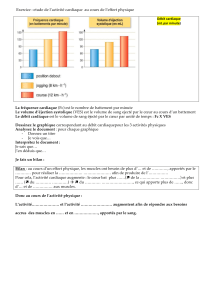
J’ai donc effectué ce balayage et obtenu les graphes de
la figure 2.3.
0
100
200
300
400
500
-0.6 -0.4 -0.2 0 0.2 0.4 0.6
Tension (mV)
Déplacement (mm)
Fit
Waist large
Fit
Waist fin
Fig 2.3 – Tension observée à l’oscilloscope en fonction du dépla-
cement horizontal du photodétecteur dans le cas où le
waist du faisceau est plus large que la photodiode (fit
du type I(x) = I0exp −x2/σ2) et dans le cas où le
waist du faisceau est plus petit que la photodiode (fit
du type I(x) = I0{erf [(r−x)/σ] + erf [(r+x)/σ]}).
Le profil d’intensité d’un faisceau gaussien au niveau
de son waist est donné par :
I(ρ) = I0exp −2ρ2
w2
0(2.1)
Avec ρla distance à l’axe optique, et w0le waist du
faisceau. Les données du fit dans le cas où le waist est
plus large que la photodiode permettent de remonter au
waist du fasiceau, puisque l’on a alors w0=√2σ. On
obtient ainsi w0= 207(1) µm, ce qui est effectivement
plus grand que le rayon de la photodiode.
Dans le cas où le waist est plus petit que le rayon
de la photodiode, on peut approximer la réponse Rdu
photodétecteur en fonction de la position xdu faisceau
sous la forme :
R(x)∝Zr
−r
I(y−x)dy
∝erf r−x
w0+ erf r+x
w0(2.2)
Dans cette formule, on écrit que la réponse de la photo-
diode est proportionnelle à l’intensité totale du faisceau
qui la recouvre, et on suppose pour simplifier que l’on
est en une seule dimension. Les résultats du deuxième
fit nous donnent alors un waist w0= 42(3) µm. Notons

Montage et caractérisation d’un photodétecteur pour une détection hétérodyne optique 4
toutefois que la correspondance entre le fit et les don-
nées n’est pas parfaite, en particulier sur les bords : la
décroissance est plus forte pour le fit que pour les don-
nées. Cela est du à la géométrie du problème (qui est
en réalité un problème en deux dimensions). La diffé-
rence entre le fit et les données provient donc des effets
de bords qui apparaissent lorsque le faisceau n’est qu’à
moitié sur la photodiode. Il est aussi possible que le fais-
ceau ne soit pas parfaitement gaussien.
Les données du fit permettent alors d’évaluer les
pertes liées à la taille de la photodiode. On estime en
effet que 99.83(2) % de l’intensité totale du faisceau est
absorbée par la photodiode, si le faisceau est correcte-
ment centré sur la photodiode. Il est toujours possible de
diminuer les pertes en focalisant encore plus le faisceau,
mais cela risque alors de saturer localement la photo-
diode.
Une fois que le faisceau est correctement focalisé sur
la photodiode, on peut commencer à caractériser la voie
DC. Il s’agit simplement de déterminer la réponse du
photodétecteur, i.e. la tension en sortie en fonction de la
puissance en entrée. La puissance incidente est contrôlée
à l’aide de la densité réglable placée juste avant le photo-
détecteur (voir figure 2.2) et d’un puissance-mètre. On
obtient le graphe de la figure 2.4.
0
1000
2000
3000
4000
5000
0 2 4 6 8 10
Tension (mV)
Puissance (mW)
Fit linéaire
Données
Fig 2.4 – Tension observée à l’oscilloscope en fonction de la puis-
sance lumineuse incidente. Le fit a été effectué avec une
fonction linéaire.
Le graphe 2.4 nous indique ainsi que la réponse de
la photodiode est proportionnelle à la puissance lumi-
neuse incidente au moins jusqu’à 10 mW. On notera
donc R=kP , avec Rla réponse de la photodiode (en
V), Pla puissance incidente (en W) et kle coefficient
de réponse (en V/W). Les résultats du fit linéaire nous
donnent alors k= 420.14(87) V/W(l’incertitude est ob-
tenue par les données du fit).
Une fois cette caractérisation effectuée, on est en me-
sure d’évaluer l’efficacité quantique du photodétecteur,
notée η. L’efficacité quantique est le rapport du nombre
d’électrons produits par la photodiode sur le nombre de
photons incidents, soit :
η=ihc
qP λ (2.3)
Avec ile courant produit par la photodiode, qla charge
élémentaire, Pla puissance incidente et λla longueur
d’onde du laser. On peut relier le courant produit par la
photodiode à la tension Vout en sortie du photodétecteur
par la relation :
i=Vout
R2(1 + R4/R11)(2.4)
En combinant les deux équations précédentes, on ob-
tient :
η=khc
R2(1 + R4/R11)qλ (2.5)
Avec kle coefficient de réponse calculé précédemment.
La résistance R11 est mesurée sur le circuit, ce qui
permet d’obtenir au final η= 0.958(65). Cette valeur
semble compatible avec les photodiodes d’autres équipes
de recherche [4].
2.3 Voie RF et mesure du shot noise
Caractériser la voie RF permet non seulement de
déterminer la bande passante du photodétecteur, mais
peut aussi permettre d’évaluer sa sensibilité. Cette ca-
ractérisation se fait par le montage de la figure 2.5.
PD
SpecAn
Oscillo.
+24 dB
Ampli
DC RF
100
from
YAG
Fig 2.5 – Montage optique réalisé pour caractériser la voie RF.
SpecAn désigne un analyseur de spectre.
On mesure ainsi la réponse de la voie RF jusqu’à
1 GHz et en faisant varier la puissance incidente jusqu’à
10 mW environ. On obtient les courbes de la figure 2.6.
-85
-80
-75
-70
-65
-60
-55
-50
-45
0 200 400 600 800 1000
Puissance (dBm)
Fréquence (MHz)
0.00 mW
1.20 mW
2.38 mW
3.57 mW
4.78 mW
5.95 mW
7.16 mW
8.33 mW
9.52 mW
Fig 2.6 – Bruit de la voie RF du photodétecteur amplifié de
24 dB et moyenné 200 fois. Chaque courbe correspond
à une puissance lumineuse fixée. La courbe correspon-
dant à 0.00 mW a été obtenue en cachant la photo-
diode.
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%