TP n°7 : Effet Doppler sonore et application

1/4
TP n°7 : Effet Doppler sonore et application
Situation :
Matthieu et Katell, basés au bord de la route, regardent et écoutent la voiture de
Sébastien Loeb qui déboule à pleine vitesse. Ils se rendent compte que la perception
qu’ils ont du son de la voiture n’est pas la même lorsque le véhicule s’approche ou
s’éloigne d’eux: c’est l’effet Doppler.
L’effet doppler correspond à un changement de la fréquence d’une onde perçue
par un observateur lorsque l’émetteur de cette onde est en mouvement. Cet effet
fut présenté par Christian Doppler en 1842.
I) Etude de l’effet Doppler
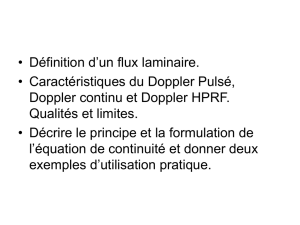
1) Montage :
Placer sur la réglette grise l’émetteur d’ultrason (à brancher au générateur régler sur 15 V en mode
continu) ainsi que les deux récepteurs.
Le premier des récepteurs A immobile est à relier sur la voie EA0, il servira à obtenir un signal de
référence.
Le deuxième récepteur B sur la voie EA1 de l’interface Sysam. Il sera mobile.
La barrière optique : Elle permet de déclencher l'acquisition à la coupure du
faisceau lumineux quand le récepteur mobile B le coupera. Le temps de
coupure du faisceau va permettre de calculer la vitesse de déplacement du
récepteur à ultrason.
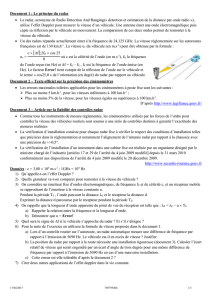
Réalisation de la barrière optique :
- Sur la plaquette grise, réaliser le circuit ci-contre qui contient en série la
photorésistance, le conducteur ohmique de résistance R = 470 Ohms et
le générateur réglé sur 5,0 V.
- Relier la voie EA2 et la masse de Sysam aux bornes de la résistance R.
Schéma du dispositif :
Disposer l’ensemble des
éléments du montage tel
que sur la photo ci-
dessous.
Appeler le professeur
pour vérification.
Mode salve
Mode continu
Christian Doppler
1803-1853
+ -
G
R
Photorésistance
EA2
masse
A B

2/4
2) Mesures et exploitation :
Après avoir réalisé le montage, utiliser la fiche annexe1 afin de réaliser les réglages adéquats.
Réaliser plusieurs essais en approchant puis en éloignant le récepteur.
a) Qu’observe-t-on pour la fréquence f1 mesurée par le récepteur mobile lorsque celui-ci se
rapproche de l’émetteur ? Lorsque le récepteur s’éloigne de l’émetteur ?
b) Quel est le signe du décalage Doppler Df = f1-f0 pour les deux sens de déplacement ?
3) Interprétation de l’effet doppler.
Source au repos
L’ambulance produit des ondes sonores de fréquence f0
qui se propagent à la vitesse du son Vson.
a) Que dire de la longueur séparant chaque
front d’onde pour les observateurs A et B ?
b) Que dire alors de la période T et de la
fréquence f des ondes pour ces observateurs ?
Source en mouvement
L’ambulance produit toujours des ondes de fréquence f0 qui se propagent à la vitesse du son Vson mais
l’ambulance se déplace cette fois-ci avec une vitesse VE.
a) Que dire des longueurs A et B séparant
chaque front d’onde pour les observateurs A et B
par rapport à la longueur ?
b) Que peut-on alors en déduire pour les fréquences
fA et fB réceptionnées par les observateurs en A
et en B par rapport à la fréquence d’émission f0
des d’ondes ?
c) Conclure sur le décalage Doppler Df = fobservateur-f0 pour les observateurs en A et en B.
4) Détermination de la vitesse du son dans l’air.
Effectuer plusieurs enregistrements et relever à chaque fois les valeurs de df et du temps de
passage t devant la barrière optique. (voir partie 2 de l’annexe pour la mesure de temps de
passage).
Calculer à chaque fois la vitesse de déplacement du récepteur mobile V.
Calculer la valeur de la célérité du son Vson dans l’air à l’aide de la relation suivante :
V = Vson * |Df| / f0
Compléter le tableau de la page suivante.
|Df| (Hz)
t(s)
V (m/s)
Vson (m/s)

3/4
Déterminer la valeur moyenne de la célérité du son dans l’air Vson lors de vos expériences,
Comparer à la valeur attendue à 25°C, Vson = 3,4.102m/s.
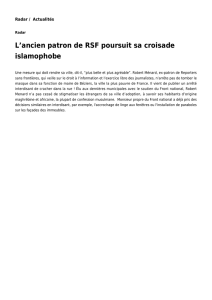
II) Application : le conducteur peut-il être sanctionné pour excès de vitesse ?
1) Présentation du principe de fonctionnement d'un radar routier
Le mot radar provient de l'acronyme anglais : RAdio Detection And Ranging, que
l'on peut traduire par « détection et estimation de la distance par ondes radio ».
La gendarmerie utilise des radars dont le principe est basé sur l’effet Doppler. Une
onde électromagnétique émise par un radar est réfléchie par la voiture puis captée
par un récepteur. La voiture étant en mouvement, l’onde réfléchie possède une
fréquence légèrement différente de celle émise : une plus grande fréquence pour les
véhicules s'approchant du radar et plus petite pour ceux s'en éloignant.
C’est la mesure de ce décalage entre la fréquence émise par le radar notée fsource et la fréquence reçue
par le radar après réflexion sur la voiture notée freçue qui permet de remonter à la vitesse de la voiture.
Soit |Δf| la valeur absolue du décalage Doppler (la différence de fréquence) :
fsourcefreçuef
)cos(2)cos(2
freçue
fsourcefreçue
Vson
freçue
f
VsonV
L’angle correspond à l’angle entre la direction de la route et celle de la
visée du radar. Cet angle est ajusté lors de l’installation du radar et doit être
de 25° pour un fonctionnement correct du radar.
On dispose des enregistrements du radar :
- Enregistrement sonore aux formats .wav: « son de référence du radar »
- Enregistrement sonore aux formats .wav: « son du radar réfléchi »
Ces enregistrements sont disponibles sur le « disque local D » de chaque ordinateur, dans le dossier
nommé « TP Doppler ».
2) Déterminer la vitesse de la voiture sur une route limitée à 50km/h :
Consignes:
- par l’usage d’un logiciel adapté, déterminer les grandeurs nécessaires pour pouvoir calculer
la vitesse du véhicule à l’approche d’un radar automatique.
- Rédiger clairement l’ensemble de votre résolution : grandeurs mesurées, calculs, réponse à
la situation problème.
Indication : vitesse du son dans l’air à 25°C : Vson = 3,4.102 m/s

4/4
Fiche annexe
Partie 1 : Réglage de l'acquisition
Sélectionner EA0, EA1 et EA2
Nombre de points : 18070
Durée totale d'acquisition : prendre 150 ms
Synchronisation (déclenchement)
Sur EA2 (signal de la barrière optique)
Sens : Front descendant
pretrig de 25%
Seuil 1,5V.
Acquisition
Appuyer sur F10 (Sysam se met en attente du signal de synchronisation)
Déplacer plus ou moins rapidement le récepteur mobile devant la barrière, il doit passer totalement
devant la barrière.
Attendre le transfert dans Latis (il peut mettre plusieurs secondes en raison du nombre important de
points)
Feuille de calcul
Afficher la feuille de calcul (F3)
Inscrire dans la feuille (sans espace, sans accent) :
f0=frequence(EA0)
f1=frequence(EA1)
Df=f1-f0
- Appuyer sur la touche F2 pour faire le calcul
Fermer la feuille de calcul, les scalaires f0, f1 et Df
apparaissent sous la liste des courbes (cliquer sur
Faire un double-clic sur les noms pour indiquer les
unités
Affichage des fréquences
Ouvrir la fenêtre de l'afficheur (cliquer sur fenêtre
puis afficheur)
Choisir un afficheur triple (à gauche de la fenêtre)
Cliquer/glisser les scalaires f0, f1 et Df sur les trois afficheurs
Partie2 : Mesure de la vitesse :
Sur Sysam mesurer le temps t de
coupure de la barrière optique.
Vérifier que la largeur d de l'obstacle
qui coupe la barrière (taille de la tête
du récepteur) est de 3,0cm
Calculer la vitesse v = d/t
On suppose que le récepteur va à la
même vitesse durant toute la durée de
l'acquisition.
1
/
4
100%