Presentation

Initiation `a la programmation sur cartes graphiques
Exemples du SDK de Nvidia + reconstruction tomographique
Nicolas GAC
Djafariales au GPI, le 6 Avril 2010

2/79
Architecture des processeurs graphiques
Programmation sous CUDA
Exemples du SDK de CUDA
Reconstruction tomographique
1Architecture des processeurs graphiques
GPU : Graphic Processing Unit
Avant CUDA /
Apr`es CUDA ,
2Programmation sous CUDA
Principes g´en´eraux
Multiplication de matrices
3Exemples du SDK de CUDA
4Reconstruction tomographique sur GPUs
Projet TOMOX
Algorithme bay´esien it´eratif du L2S/CEA
Impl´ementation sur GPU
R´esultats et travaux en cours
2/79

3/79
Architecture des processeurs graphiques
Programmation sous CUDA
Exemples du SDK de CUDA
Reconstruction tomographique
GPU : Graphic Processing Unit
Avant CUDA : pipeline graphique
Apr`es CUDA : plein de threads !
1Architecture des processeurs graphiques
GPU : Graphic Processing Unit
Avant CUDA /
Apr`es CUDA ,
2Programmation sous CUDA
3Exemples du SDK de CUDA
4Reconstruction tomographique sur GPUs
3/79

4/79
Architecture des processeurs graphiques
Programmation sous CUDA
Exemples du SDK de CUDA
Reconstruction tomographique
GPU : Graphic Processing Unit
Avant CUDA : pipeline graphique
Apr`es CUDA : plein de threads !
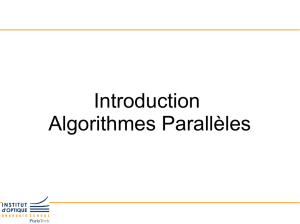
GPU : Graphic Processing Unit
Evolution vers une architecture many core
A l’origine, architecture d´edi´ee pour le rendu de volume
òPipeline graphique (prog. en OpenGL/Cg)
Depuis 2006, architecture adapt´ee `a la parall´elisation de divers
calculs scientifiques
òCUDA : Common Unified Device Architecure (prog. en C)
4/79

 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
1
/
86
100%