Introduction aux réseaux de Petri de haut niveau (les réseaux colorés)

1
Introduction aux
réseaux de Petri de haut niveau
(les réseaux colorés)
J.F. Peyre - C. Dutheillet
1 - Modélisation
Master Informatique - Spécialité SAR
NI405 - Modélisation des systèmes répartis

2
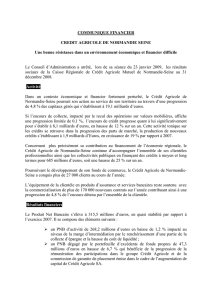
Pourquoi les réseaux de haut niveau ?
•Problème :
n processus en exclusion mutuelle sur 1 ressource
Attente
En cours
Repos
Ressource
Attente2
Repos2
En cours2
n = 1
n = 2

3
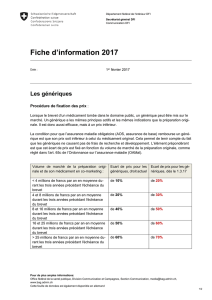
Pourquoi les réseaux de haut niveau ?
•Problème 2 :
n1 processus en exclusion mutuelle sur n2 ressources
n1 = 2
n2 = 2
•
•
••

4
Pourquoi les réseaux de haut niveau ?
•Les réseaux de Petri ordinaires
– ne capturent pas les symétries d’un problème
– ne permettent pas d’associer des informations aux jetons
– Ne permettent pas de paramétrer la solution d’un problème
➥Utiliser une notation concise et paramétrée des réseaux
de Petri :
les réseaux de haut-niveau

5
Les réseaux de Petri colorés
 6
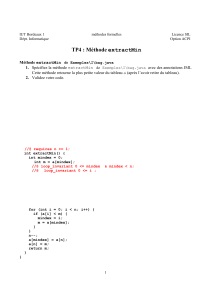
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
1
/
37
100%