Extrait du livre : Chapitre 3

COMMENT VOLE UN DRONE?
CHAPITRE 3
«L’homme doit s’élever au-dessus de la Terre – aux limites de l’atmosphère
et au-delà – ainsi seulement pourra-t-il comprendre tout à fait le monde dans lequel il vit.»
Socrate
Qu’un avion vole, cela n’étonne plus personne après un siècle d’aviation. Mais pour certains
drones, il y a de quoi se poser à nouveau la question. Ce chapitre rappelle les grands prin-
cipes du vol, et les applique aux drones. De plus, en raison de leur faible poids, les drones sont
sensibles au vent: cet argument météorologique doit être pris en considération par l’apprenti
pilote.
Un peu de théorie
Pauvres Terriens que nous sommes: tout corps sur Terre a une masse et la gravité nous
entraîne irrémédiablement vers le sol.
En revanche, nous avons la chance d’être entourés d’air, doté d’une certaine densité. On s’en
rend compte lorsqu’on met la main hors de la fenêtre d’une voiture: on sent la force du
«vent relatif» qui pousse la main dans la direction opposée au sens de déplacement de la
voiture. Cette force s’appelle en aéronautique la «traînée»; elle s’oppose à la direction que
l’on veut prendre. Cependant, si l’on met la main à plat, on sent beaucoup moins la force du
vent. Pourquoi? Parce que la section exposée au vent a diminué et que la section restante (le
tranchant de la main) fend l’air, rendant la surface exposée plus aérodynamique.
Pour trouver des formes aérodynamiques, il sut de regarder la nature. Ainsi, la goutte
d’eau, lorsqu’elle tombe du ciel, prend une forme ronde à l’avant et elée à l’arrière. Il y a
donc moyen de réduire la traînée en adoptant une forme adéquate. Maintenant, reprenons
l’exemple de la main à l’extérieur de la fenêtre de la voiture: gardez la main à plat mais
inclinez-la légèrement (j’espère que ce n’est pas vous qui êtes au volant!). La sensation de
résistance reprend. C’est normal, puisque la section exposée au vent a augmenté à nouveau.
Mais une deuxième force s’est ajoutée: la main a envie de monter. En inclinant la main, vous
avez créé un angle avec le vent. En aéronautique, cet angle s’appelle l’«angle d’incidence»,
simplement résumé par «incidence» et la force qui fait monter la main est la «portance».
Variez la vitesse de la voiture, et vous ferez aussi varier les forces aérodynamiques précitées.
CHAPITRE 3. COMMENT VOLE UN DRONE? 61

LES DRONES
62
Mais user de votre moteur a des limites et puis vous allez dépenser rapidement le plein
d’essence. La force de votre moteur s’appelle en aéronautique la «traction».
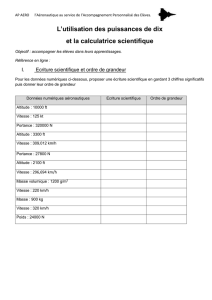
Finalement, sur Terre, il y a moyen de générer avec une traction une force aérodynamique
capable de vous soustraire à votre condition de rampant (figure 3-1). Voyons comment les
avions et hélicoptères s’en servent pour voler et se diriger.
Petit lexique d’aéronautique
• La
traînée
estlaforcecrééeparleventrelatifetquis’opposeaudéplacement.
• L’
incidence
estl’angleforméparl’inclinaisondelamainparrapportàladirectionduventrelatif.
• La
portance
estlaforcecrééeparl’incidencedelamainetquipousselamainverslehaut.
• La
traction
estlaforcecrééeparlemoteurquicréeledéplacementversl’avant.
Tout aéronef a pour vocation de voler vite, loin, avec la plus lourde charge utile, et à moindre
coût. De fait, tous les constructeurs aéronautiques s’eorcent d’obtenir le maximum de
portance pour la moindre traînée et traction, et construire léger.
Figure 3-1. Les quatre forces appliquées à un aéronef en vol
Domaine de vol
Le domaine de vol est défini par les limites de vitesse et d’incidence au-delà desquelles
l’aéronef ne vole plus et tombe comme une pierre. Il est diérent selon que l’aéronef est à
voilure fixe ou voilure tournante.

CHAPITRE 3. COMMENT VOLE UN DRONE? 63
CAS DES VOILURES FIXES
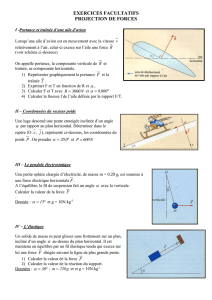
En roulant sur la piste de décollage, l’avion génère du vent relatif sur la voilure et ce vent se
transforme en portance dès que l’on crée un angle d’incidence: c’est un moyen indirect, mais
ecace.
Figure 3-2. Vent relatif et portance
Bord
d’attaque
Bord
de fuite
Intrados
Extrados
On a compris que la portance d’une voilure est fortement corrélée avec l’inclinaison des
bords des ailerons qui va créer un angle d’incidence, ce qui peut se résumer par la phrase «la
portance est surtout une histoire d’incidence». Il faut cependant compléter avec deux autres
notions: le profil de l’aile et l’eondrement de la portance.
Profil de l’aile
La portance dépend aussi du profil de l’aile car, en touchant le bord d’attaque d’une aile, les
molécules d’air se séparent entre celles qui vont contourner l’aile par l’extrados (le haut) et
celles qui vont passer par l’intrados (le bas).
Figure 3-3. Le vent relatif sur l’aile crée la portance.
Ensuite, comme une histoire d’amour, les mêmes molécules se retrouvent au bord de fuite.
Comment peuvent-elles se rejoindre alors que le profil d’une aile rend le parcours plus long
du côté extrados? Tout simplement en accélérant. Cette accélération crée une pression
moins forte sur l’extrados que sur l’intrados et l’aile est «aspirée» vers le haut.

LES DRONES
64
Figure 3-4. Une augmentation de l’incidence entraîne une augmentation de la portance.
Eondrement de la portance
Au-delà d’une certaine incidence, la portance s’eondre et les filets d’air se détachent de
l’extrados: on dit que l’aile «décroche». Un avion se trouvant à cette incidence ne vole plus,
il tombe.
Enfin, il faut réaliser qu’en vol en palier, l’incidence et la vitesse sont liées: à basse vitesse, il
faut cabrer l’avion (en tirant sur le manche) pour maintenir le palier, sinon l’avion descend;
en haute vitesse, il faut au contraire pousser le manche, sinon l’avion monte. Ainsi, l’incidence
de décrochage est aussi une vitesse minimale: la vitesse de décrochage. Le domaine de vol
d’une voilure fixe est donc limité par sa vitesse de décrochage.
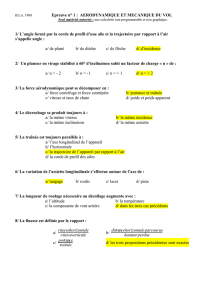
Figure 3-5. Angle d’incidence de 15° (en haut) et de 18° (en bas)
Portance
Portance
angle = 15°
angle = 18°

CHAPITRE 3. COMMENT VOLE UN DRONE? 65
Examinons plus attentivement la figure3-5. À 15° d’incidence (schéma du haut), la portance
est à son maximum mais les filets d’air ne collent plus à la moitié arrière de l’extrados et
une zone de turbulence (nuage bleu) se crée au bord de fuite. Si l’incidence est augmentée
à 18° (schéma du bas), l’aile décroche, les filets d’air ne collent plus sur presque la totalité de
l’intrados. Dès lors, la portance chute et l’avion pique du nez et descend rapidement.
Ce phénomène a deux conséquences.
1. Pour décoller, un drone à voilure fixe doit rouler sur une piste, être lancé à la main ou être
catapulté. Les décollages et atterrissages sont presque horizontaux et doivent se faire face
au vent, car c’est la vitesse par rapport à l’air qui génère de la portance, non celle avec le
sol. Il faut donc disposer d’un terrain assez grand, sans obstacle et bien orienté.
Il ne vole plus en deçà d’une certaine vitesse appelée «vitesse de décrochage» où il
se met à piquer, ce qui implique d’accélérer jusqu’à ce que la vitesse revienne dans le
domaine du vol. Cette vitesse doit être maintenue jusqu’à l’atterrissage. En touchant le
sol, l’avion passe d’une vitesse
v
(supérieure à celle de décrochage) à une vitesse 0. Cela
peut être violent, surtout en mode automatique où l’arrondi, qui est un geste qui nécessite
une anticipation de l’approche du sol et devrait donc être réalisé typiquement en mode
manuel, n’est pas assuré.
2. Les voilures fixes sont sensibles aux turbulences, souvent présentes près du sol.
L’atterrissage est le moment où le drone à voilure fixe y est le plus exposé, car la faible
vitesse rend les commandes peu ecaces pour les contrer. Le drone doit respecter un
angle de montée maximal au-delà duquel la vitesse (et la portance) chute, ainsi qu’un
angle de descente maximal, au-delà duquel la vitesse augmente trop.
CAS DES VOILURES TOURNANTES
Au même titre qu’un avion génère sa portance par la translation d’une voilure, la voilure tour-
nante la génère par la rotation de la voilure. Les pales d’un rotor se comportent comme une
petite aile, avec une incidence et un profil. Elles ont un domaine de vol plus étendu que les
voilures fixes car elles peuvent voler à vitesse zéro, en stationnaire, sur les côtés ou à reculons,
tant que le rotor fournit la portance nécessaire. On l’a vu, une augmentation de cette portance
peut être générée simplement par une vitesse de rotation ou un pas plus grand.
C’est là qu’intervient une diérence fondamentale entre les drones multirotors et les hélicop-
tères traditionnels. Les premiers font varier la portance uniquement en modulant la vitesse
de rotation des rotors (ceci est rendu possible grâce à la petite taille des hélices, donc à
leur faible inertie, et à la motorisation électrique qui peut être contrôlée très finement); les
seconds maintiennent quant à eux une vitesse de rotation constante du rotor principal, mais
modulent la portance uniquement en faisant varier le pas (ceci est rendu possible au prix
d’une mécanique beaucoup plus complexe). Cette variation de pas modifie l’incidence des
« petites ailes » du rotor sur la portance locale.
La vitesse d’une voilure tournante ne peut dépasser la vitesse d’extrémité des rotors, sinon la
portance diminue. Il s’agit d’un mur que l’hélicoptère ou le multirotor ne peut dépasser. Mais
il y a de la marge, car à l’extrémité du rotor, la vitesse peut atteindre 400km/h.
 6
6
1
/
6
100%