La constance en vision - Mark Wexler

La constance en vision
Définition de la constance
La constance de luminance
La constance spatiale lors des mouvements oculaires
Constance de taille
Constance de forme (statique)
Constance de forme (dynamique)

• Je m’appelle Mark Wexler
• Vous trouverez ce cours sur mon site :
http://wexler.free.fr/
• Si vous avez des questions, n’hésitez pas
à me contacter à :

Définition de la constance
• Au lieu de percevoir les données sensorielles
directement …
S= P
• … les interpréter comme combinaison, parfois
complexe, d’une partie variable (v) et une
partie invariable (i) …
S= f(v, i)
• … et percevoir la partie invariable
S= f(v, i= P)

La constance de luminance
• Soyons simples, restons en N&B !
• Problème physique : comment quantifier
si une surface est sombre ou claire ?
Luminosité = Illumination ×Reflectivité
Le flux d’énergie lumi-
neuse qui atteint l’œil Conditions ambiantes
Une vraie propriété
invariante d’une
surface
brightness lightness

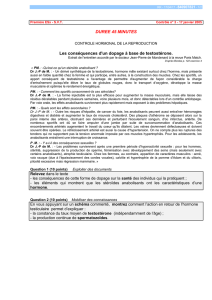
Exemples de constance
• Le ‘noir’ et le ‘blanc’
d’une page imprimée
semblent avoir presque
les mêmes luminosités à
l’intérieur et à
l’extérieur
–Rblanc ≈10 Rencre
–Iextérieur ≈100 Iintérieur
–Lnoir ext. ≈10 Lblanc int. !
• Une seule surface noire
matte dans un spot très
lumineux paraît blanche
(l’effet de Gelb)
– Mais elle paraît gris foncé
à côté d’une surface
blanche
• L’illusion de contraste
simultané (décrite par
Chevreul au XIXème)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
1
/
60
100%