L`amplification

1
L'amplification
1. Introduction
Lorsqu'on parle d'amplification (amplificateurs) on sous entend transistors et bien sur semi-conducteurs.
2. Les semi-conducteurs
2.1 Définition
.
.
.
2.2 Différents types de semi-conducteurs
Selon le degré de pureté, on trouve :
Les semi-conducteurs intrinsèques ;
Les semi-conducteurs extrinsèques.
2.2.1 Semi-conducteurs intrinsèques
Ce sont des semi-conducteurs très purs (taux d'impuretés très faible).
Moins d’un atome d'impureté pour atomes de l'élément S/C.
Ils se comportent comme des isolants à très basse température.
Leur conductivité augmente avec la température.
2.2.2 Semi-conducteurs extrinsèques
Lorsqu'on ajoute à un semi-conducteur intrinsèque des atomes d'impuretés convenablement choisis :
Sa conductivité augmente.
Cette opération s'appelle : le dopage.
Les atomes d'impuretés sont appelés dopants.
Le semi-conducteur obtenu est dit extrinsèque.
On distingue deux types de semi-conducteurs extrinsèques :
Semi-conducteurs extrinsèques type ;
Semi-conducteurs extrinsèques type .
2.2.2.1 S.C. extrinsèques type N
Chaque atome du S/C est relié à 4 atomes voisins.
Les liaisons entre les atomes sont covalentes.
Chaque liaison met en jeux 2 électrons.
L’introduction d’un atome ayant 5 électrons de valence (phosphore)
Cet atome prend la place d'un atome du cristal.
Quatre des électrons de l'impureté participeront aux 4 liaisons.
le 5ème électron reste célibataire.
Cet électron peut facilement passer dans la bande de conduction sous l'action de l'agitation
thermique.
Augmentation de la conductivité électrique.

2
2.2.2.2 S.C. extrinsèques type P
L’introduction d’un atome ayant 3 électrons de valence (bore, aluminium).
Cet atome ne peut saturer que 3 liaisons sur 4.
Il manque donc une liaison par atome d'impureté.
Il y a manque d'un électron qui est équivalent à un trou libre.
au trou libre correspond un niveau d'énergie appelé niveau accepteur.
Au zéro absolu, ces niveaux accepteurs sont vides.
lorsqu'on augmente la température les trous peuvent être occupés par des électrons provenant
de la bande de valence.
Les niveaux libres de la BV engendrent des trous et la conductivité devient de type .
3. Les transistors
3.1 Définition
Le transistor bipolaire est constitué de semi conducteurs dopés formant un cristal de type ou
.
Les deux parties extrêmes sont appelées l’un émetteur et l’autre collecteur.
Ils sont toujours de même type ( ou ).
L’émetteur est plus épais et plus dopé que le collecteur.
La partie centrale est appelée base.
Elle est d’épaisseur très mince et de dopage faible et opposé à celui des deux autres régions.
Le transistor présente deux jonctions : émetteur-base et collecteur-base.
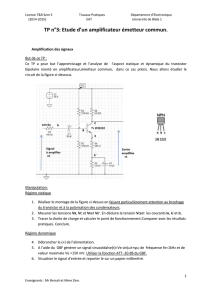
3.2 Effet transistor
L’émetteur est relié au pôle négatif d’une source électrique.
Le collecteur est relié au pôle positif.
La base est portée à un potentiel positif par rapport à l’émetteur et négatif par rapport au collecteur.
Ce qui donne :
Une jonction émetteur-base polarisée dans le sens passant.
Une jonction collecteur-base polarisée dans le sens inverse.

3
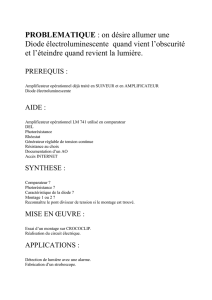
La jonction émetteur-base étant polarisée en direct, le passage des électrons majoritaires de
l’émetteur vers la base s’effectue facilement.
La base étant très étroite et peu dopée, beaucoup d’électrons vont pouvoir passer vers le collecteur.
Arrivés dans le collecteur, ces électrons vont être entrainés par le champ extérieur qui polarise la
jonction collecteur-base en inverse et sont ainsi captés par le collecteur.
Notons que la polarisation inverse de la jonction collecteur-base crée un courant de minoritaires pro-
venant de la base appelé courant de saturation et noté .
Ce courant va donc s’ajouter à celui des électrons provenant de la jonction émetteur-base.
Certains électrons provenant de l’émetteur vont être neutralisés par les trous de la base à cause du
phénomène de recombinaison.
D'autres électrons provenant de l’émetteur vont pouvoir traverser la base. Ce qui donne :
Un courant très important.
Un courant faible.
Un courant important.
Polarisation directe-inverse des jonctions du transistor.
L’effet transistor se traduit par le passage d’un courant important à travers une résistance infinie
(résistance de la jonction collecteur-base polarisée en inverse).
3.3 Régime de fonctionnement du transistor
On plus de l'état de fonctionnement normal transistor peut se trouver dans deux états extrêmes :
Etat bloqué.
Etat saturé.
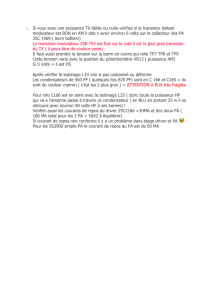
3.3.1 Transistor bloqué
Polarisation inverse-inverse des jonctions du transistor.
La diode émetteur-base est polarisée en inverse.
Le courant de base devient nul.
Le courant collecteur est négligeable et la tension.
vaut alors : ( de blocage = ).
-
+
-
+
-
+
-
+
Nombreux e-
Nombreux e-
Quelques e-

4
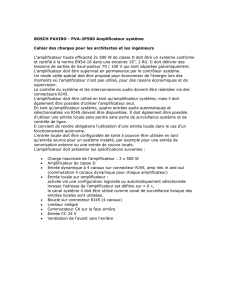
3.3.2 Transistor saturé
Polarisation directe-directe des jonctions du transistor.
La diode collecteur-base est polarisée en directe.
Le courant collecteur atteint son maximum.
Le courant de base vaut IB saturation et la tension VBE saturation est très faible.
Le courant collecteur vaut alors
.
3.4 Montages fondamentaux du transistor bipolaire
nous ramenons le transistor à un quadripôle (un système à quatre bornes).
Puisque le transistor ne possède que trois électrodes, l’une d’entre elle doit être commune à l’entrée
et à la sortie.
3.5 Caractéristiques du transistor bipolaire
Le quadripôle suivant est caractérisé du point de vue statique par :
Les grandeurs d’entée et .
Les grandeurs de sortie et .
-
+
-
+

5
Caractéristique d’entrée : = () à
Caractéristique de sortie : à
Caractéristique des courants : à
Caractéristique des tensions : à
3.6 Polarisation du transistor bipolaire
La polarisation a pour rôle de placer le point de fonctionnement du transistor dans une zone où ses
caractéristiques sont linéaires.
Pour cela on applique sur les trois électrodes du transistor des potentiels continus de valeurs conve-
nables.
3.6.1 Point de fonctionnement (de repos) Q
Au repos (lorsqu’il n’y a pas de signal d’entrée) le courant et la tension du collecteur sont : et .
Quelque soit le type de polarisation on calcule et .
Les coordonnées du point de repos Q sont : et ( et ).
Remarque : pour le point de repos Q, on utilise l’indice 0 ou bien Q.
3.6.2 Droite de charge statique
La droite de charge statique représente tous les points de fonctionnement en courant continu ou sta-
tique possibles.
On considère la maille de sortie du circuit précédent.
La tension polarise la diode collecteur-base en inverse à travers :
d’où
En considérant et comme des variables et et comme des constantes, nous pouvons
écrire :
C’est l’équation d’une droite de pente :
qui coupe l’axe des ordonnées en
et l’axe
des abscisses en .
Le point de fonctionnement est défini comme étant l’intersection de la caracté-ristique
avec la droite de charge.
+
-
+
-
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
1
/
55
100%