D. L`alimentation du moteur électrique - Hachette

37
Un peu d’énergétique
•Le point P2ne peut être atteint (couple insuffisant) : on interpose une « boîte de vitesses » (elle peut
être « manuelle » ou « automatique ») entre le moteur et sa charge; la caractéristique représentée
correspond à la « prise directe » (4erapport), 3 rapports inférieurs facilitent les accélérations et les
montées, un rapport supérieur (surmultiplié) permet au moteur d’assurer les 130 km◊h–1 (point P1) à
4 000 tr◊min–1 au lieu de 5 800.
Cet exemple nous montre que l’équipement permet d’adapter les caractéristiques d’un moteur
à celle de la machine à entraîner.
D. L’alimentation du moteur électrique
Elle est destinée à fournir au moteur l’énergie sous la forme qui lui convient.
1. Elle fournit l’énergie
a. L’alimentation doit délivrer une puissance suffisante : ce sera la puissance absorbée par le
moteur. Nous savons que la puissance absorbée représente la puissance utile augmentée de l’en-
semble des pertes. Au régime nominal, le rendement du moteur est donné par le constructeur, et la
puissance absorbée par le moteur est :
puisque par définition, h= ;
c’est Paqui doit être délivrée par l’alimentation. Dans notre exemple, il faut prévoir 50 kW et même
davantage si le moteur doit fonctionner en surpuissance (démarrages).
b. L’alimentation doit permettre une certaine durée d’action à la machine.
Cette durée est théoriquement infinie si la source est le réseau de distribution d’électricité.
Si l’énergie doit être stockée, pour un véhicule autonome par exemple, il faut que ce stock soit
renouvelable (batteries d’accumulateurs) et suffisant pour permettre au véhicule une réelle autono-
mie; on sait que ce problème de capacité des batteries, sous un volume, pour une masse et un coût
raisonnable, est crucial!
2. Elle convient au moteur
a. Un moteur à courant continu doit être alimenté sous une tension unidirectionnelle, la bobine de
lissage assurant la continuité du courant.
Des batteries d’accumulateurs conviennent.
La tension alternative du réseau convient également, mais par l’intermédiaire d’un convertisseur
alternatif-continu (ils seront étudiés aux chapitres 17 et 18); l’alimentation est alors l’ensemble
réseau-convertisseur.
b. Un moteur à courant alternatif doit être alimenté sous une (ou des) tension(s) alternative(s).
Le réseau E.D.F. convient.
Des batteries d’accumulateurs conviennent également, mais par l’intermédiaire d’un convertisseur
continu-alternatif, c’est-à-dire un onduleur (étudié au chapitre 19); l’alimentation est alors l’en-
semble batterie d’accumulateurs-onduleur.
3. Elle doit permettre au moteur de remplir la totalité de sa fonction
(Si ce n’est pas possible, il faudra doter le moteur d’accessoires, comme au paragraphe C.4.).
a. Si on n’impose qu’une vitesse de rotation au moteur, donc l’existence d’un seul point de fonc-
tionnement pour le système moteur-machine entraînée, des solutions simples suffisent :
•batterie d’accumulateurs ou réseau + redresseur non commandé (présentant la tension convenable
et délivrant le courant nécessaire) pour un moteur à courant continu;
•réseau alternatif (par l’intermédiaire du transformateur convenable), ou batterie d’accumulateurs +
onduleur à fréquence fixe pour un moteur à courant alternatif.
Pu
Pa
Pa= —
Pu
h

38
Chapitre 3
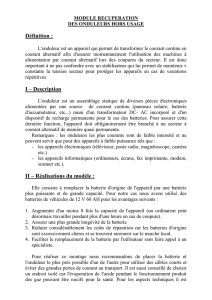
Pour le déplacement ⁄Aº]Bù, la force ⁄Fùfournit :
•le travail WF(J) = ⁄Fù◊ ⁄Aº]Bù= F◊ABcosq
•et la puissance PF(W) = = ⁄Fù◊ vü.
Au cours de la rotation de q,
le travail du couple est :
WT(J) = Tq
et la puissance : PT(W) = TW.
Le rendement d’une transformation
d’énergie s’écrit :
h= .
Pour un moteur entraînant une charge,
le point de fonctionnement stable se
caractérise par :
W= Cte ¤TU= TR.
WUtile
WAbsorbée
WF
Dt
A
Figure 16
B
q
⁄Fù
ÀÀ rreetteenniirr
b. Si plusieurs points de fonctionnement doivent être accessibles, il faut pouvoir faire varier la
vitesse de rotation du moteur sur une plage plus ou moins large, donc interposer entre la source
d’énergie et le moteur un convertisseur commandé permettant de faire varier la grandeur de com-
mande de la vitesse : hacheur, redresseur commandé, onduleur commandé…
Un système bouclé permettant d’asservir la vitesse du moteur à une consigne en intervenant sur la
commande du convertisseur peut compléter le dispositif.
E. Objectif de ce manuel
L’objectif de ce manuel est, par une étude forcément sommaire (nous ne sommes ni en section de
techniciens supérieurs, ni a fortiori en licence ou maîtrise), de cerner les propriétés des différents
types de moteurs et des différents types d’alimentation, afin de pouvoir choisir avec le maximum de
pertinence l’ensemble alimentation-moteur qui répondra au cahier des charges imposé par le fonc-
tionnement désiré de la machine à entraîner.
A
Figure 17
B
O
q
⁄Fù
–⁄Fù
r
1
/
2
100%