Accélération sur cartes graphiques des projecteurs en Tomographie X


Objectifs du stage
Méthodes de reconstruction tomographique itératives
Implémentation
Expérimentation numérique et validation
Conclusion
1Objectifs du stage
Contexte
2Méthodes de reconstruction tomographique itératives
Reconstruction tomographique
Algorithmes de projection et de rétroprojection
3Implémentation
Projecteurs
L’algorithme d’échantillonnage régulier 3D sur GPU
4Expérimentation numérique et validation
Qualité de reconstruction
Temps de reconstruction
5Conclusion
2 / 27


Objectifs du stage
Méthodes de reconstruction tomographique itératives
Implémentation
Expérimentation numérique et validation
Conclusion
Contexte
Contexte
Tomographie X
Obtenir la structure interne d’un objet à partir de données externes
(domaine clinique, contrôle non destructif)
Volume de données important (jusqu’à 20483voxels) /
Algorithmes itératifs ⇔Algorithmes analytiques (Feldkamp)
Très bonne qualité d’image ,
Projet TOMOX
Transfert technologique.
Déploiement rapide d’algorithmes de reconstruction 3D
Segmentation des objets
4 / 27

Objectifs du stage
Méthodes de reconstruction tomographique itératives
Implémentation
Expérimentation numérique et validation
Conclusion
Contexte
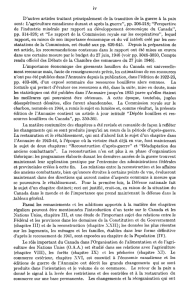
Projet TOMOX
Tomographe
Projections
Objet
1
phi
Objet reconstruit
2
GPU
RECONSTRUCTION
− Algorithme iteratif
− Acceleration sur processeurs graphiques
ACQUISITION
− Plateforme de microtomographie X
haute resolution
IMAGEUR 3D HAUTE RESOLUTION
phi
2
1
5 / 27
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%