Architecture embarquée et processeurs RISC


Architecture enfouis
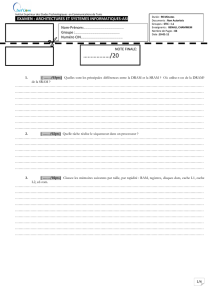
systèmes embarqués/enfouis ou System on Chip (SOC)
Ces systèmes impliquent des contraintes :
• produits largement diffusés : coûts réduits
• contraintes temporelles strictes
• sûreté de fonctionnement (e.g. aéronautique)
• taille, poids
• consommation d’énergie
Mais il faut aussi privilégier :
• la réutilisation
• la flexibilité : modifications
tardives, correction d’erreurs

Architecture enfouis
logicielle (SW) : processeur + Logiciel
flexibilité
faible temps de conception
Faible cout
matérielle (HW) : ASIC et FPGA
performances
consommation
protection industrielle
Cout élevé
Mixte
Tire profit des 2 approches => cas d’un SoC

Complémentarité HW/SW
performance XXX
consommation XXX
intégration XX
Cout de production XXX XXX (si fort
volume de
production)
flexibilité XX
Protection industrielle XXX
Cout de développement XX
Cout de production XX
Prise de risque XXX
100% SW 100% HW
Contraintes
physiques
Contraintes
économique du
produit
Contraintes
économique du
développement

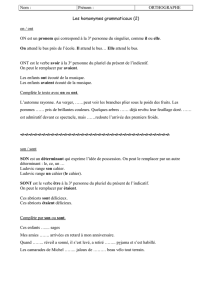
Exemple de SOC
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
1
/
39
100%