m 15 16 magnetisme - Site très riche donnant entre autres des

221
MAGNETISME
I
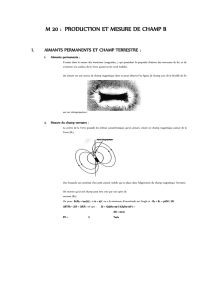
APPAREILS DE MESURE Le champ magnétique étant une grandeur vectorielle, sa
caractérisation se fait en deux étapes : détermination de la direction et du sens de
B
r
avec une
boussole puis mesure de son intensité. Pour cette mesure, deux cas de figure sont
envisageables suivant le champ qu'on étudie : -
B
r
uniforme, d’extension infinie, de faible
intensité ⇒ sa mesure relative est basée sur
BM
s
r
s
∧=τ
(boussole → cf. § 2.1).
-
B
r
localisé, d’intensité plus forte ⇒ on a
alors deux types de capteurs : - ceux utilisant BdIFd
r
l
r
r
∧= : balance de Cotton (mesure F),
sonde de Hall (mesure ddp).
- ceux utilisant
∫∫
−=
φ
−= Sd.B
dt
d
dt
d
e
r
r
: fluxmètre
électronique (mesure d'une ddp).
1.1 Balance de Cotton
Réf. (1), p. 217 ; Réf. (2), p. 93
Cette méthode ne présente plus qu’un intérêt pédagogique bien que ce soit le seul dispositif
qui permette une mesure absolue du champ magnétique (par la force de Laplace qu’il
engendre). Elle ne sert plus en pratique pour les mesures de champ.
1.1.1 Principe de la balance On fait circuler un courant dans un circuit
filiforme que l’on met en présence d’un champ magnétique. Ce circuit à l’allure suivante :
Chaque branche est soumise à une force de Laplace BdIFd
r
l
r
r
∧= . Les branches BC et DE
sont des secteurs circulaires centrés en O → avec l’orientation de
B
r
, la force magnétique
agissant sur ces branches sera dirigé vers O → leur moment / à O sera nul. A l’équilibre de la
balanceΣM
/O
= 0. → F
mag sur DC
× a = P× b → b g m = a BI l avec
l
=
DC
1.1.2 Réglage de la balance Prendre la balance Matlabo. Elle dispose
B
r
I
F
r
P
r
B
A
C D
E
F
a b
O

222
d’un contrepoids constitué par une chaînette qui permet de rééquilibrer le fléau en présence
d’un champ. Une échelle, directement graduée en Newton, permet de simplifier la conversion.
Placez la branche DC de la balance dans la zone ou se trouve le champ à mesurer (ne pas faire
circuler de courant pour commencer). Libérez le fléau de la balance puis ajustez le réglage des
pieds de l’appareil pour que l’extrémité du fil à plomb coïncide avec le repère situé sur la base
du dispositif. Equilibrez ensuite la balance avec le contrepoids à vis et en rajoutant des masses
si nécessaire. On peut aussi jouer sur le curseur qui fixe l’origine de la lecture. Une fois ces
réglages effectués, faites circuler un courant de quelques ampères. Réajustez l’équilibre en
jouant sur la vis de positionnement de la chaînette. On a alors :
lI)N(m
B
∆
=
1.2 Fluxmètre électronique
1.2.1 Principe du montage
Biblio : Réf. (2), p. 192 ; Réf. (3), p. 232.
L’AO est en régime linéaire ε = 0
⇒
V
-
= 0. On a alors
∫
−=−= idt
C
1
VV
CS
On commence avec l’interrupteur fermé : V
C
= 0 → V
S
= 0. On place la bobine dans le champ
à mesurer. Dès qu’on ouvre l’interrupteur, on sort la bobine de la zone de champ magnétique.
Il va apparaître une f.e.m. d’auto induction dt/de
φ
−
=
.
Comme
V
-
= 0, on a par conséquent
i = e/R.
∫ ∫
φ+=−=⇒
t
o
S
d
RC
1
dte
RC
1
V
D’où
[ ]
)0()t(
RC
1
V
S
φ−φ=
O
n a donc un fluxmètre.
t = 0 : la bobine est dans le champ B
→
φ
(0) = NSB
t : la bobine est dans un champ nul
→
φ
(t) = 0
Le dispositif permet donc de mesurer un champ magnétique.
Remarque : Dès qu’on bouge la bobine, le montage intègre les variations de flux
→
ne pas la
bouger dans les conditions initiales.
1.2.2 Problèmes de dérive Les imperfections des amplificateurs
opérationnels font que ce montage dérive dans la pratique. En effet, il intègre aussi le courant
de polarisation de l’AO ainsi que celui que génère la tension d’offset (quantités
≈
constantes)
V
S
C
R
bobine exploratrice
e
K
i
∞
∞∞
∞
+
_
→
B
RC
NS
V
S
−=

223
Dérive due au courant de polarisation : Un des écarts de l’AO réel au modèle idéal est la
présence de courant aux entrées + et – du composant. La valeur et le sens de ces courants
dépendent du type de transistor présent aux entrées de l’AO. On peut donner une limite
supérieure de la dérive que va donner le courant de polarisation i
–
en supposant qu’il circule
uniquement dans le condensateur :
∫∫
−
−
−=−= dt
C
i
dti
C
1
V
t
o
S
⇒
t
C
i
V
S−
=
Le courant de polarisation fait dériver le montage
→
on a intérêt à prendre un AO ayant des
courants de polarisation les plus faibles possibles. Les AO 071 ou 081 ont typiquement des
courants de polarisation de 100 pA (transistors d’entrée : JFET) contre typiquement 100 nA
pour les 741(transistors d’entrée : bipolaires)
→
on prendra donc un AO 071 ou 081.
Dérive due à l’offset Un autre écart de l’AO réel au modèle idéal est la présence d’une petite
différence de potentiel (tension d’offset) entre les deux entrées de l’AO. Cette tension de
décalage, positive ou négative, provient essentiellement d’une légère dissymétrie des
transistors d’entrée de l’AO. Elle dépend des tensions d’alimentation ainsi que de la
température
→
elle fluctue légèrement en fonction du temps. Pour donner une estimation de la
dérive que l’offset cause, supposons que la bobine ne subisse aucune variation de flux. Si on
ne tient compte que de la tension d’offset, le montage se modélise de la façon suivante :
∫∫
−=−=⇒=
dt
RC
e
dte
RC
1
V
R
e
i
D
DS
D
⇒
t
RC
e
V
D
S
−=
La tension d’offset fait aussi dériver le
montage.
On peut exprimer le rapport de la tension due à la mesure du champ B sur les tensions dues
aux dérives :
( )
tiRe NSB
VV
V
D
POLAISOFFS
BS −
+
=
+
Les dérives seront d’autant moins gênantes que NSB est grand. Ce système est donc mieux
adapté à la mesure de champs forts. Pour un champ B donné, on a intérêt à prendre une
bobine ayant la valeur NS la plus importante possible (inconvénient : la mesure est d’autant
moins locale). Enfin, seule la dérive due au courant de polarisation peut être atténuée vis à vis
de la mesure de B en prenant une valeur de R faible. Ce choix diminuant la valeur de la
tension à mesurer, on aura alors intérêt à prendre pour C une valeur importante.
Limitation de la dérive : On peut limiter la dérive de l’intégrateur en jouant sur le réglage de
compensation de l’offset. Ce réglage doit être aussi fin que possible → on propose deux
montages possibles suivant le matériel dont on dispose :
V
S
C
R
e
D
K
i
ε
= 0
∞
∞∞
∞
+
_

224
Pour un AO 071 ou 081, le constructeur préconise l’emploi d’un potentiomètre de 100 kΩ
(branchez ses extrémités sur les deux entrées OFF du composant). Pour que la compensation
de la dérive soit la plus fine possible, on conseille de prendre un potentiomètre multitour
(montage de gauche). Si on n’en a pas, réalisez le montage de droite. Observez le signal V
S
avec un oscilloscope permettant une observation en mode ROLL (HP 54603 ou Agilent
54621 par exemple). Ce mode permet visualiser l’évolution de la dérive du montage « en
direct » (sans temps de latence due à une base de temps trop lente). Commencez par remettre
l’intégrateur à zéro en shuntant temporairement le condensateur C avec l’interrupteur K. Une
fois la remise à zéro effectuée, vous devez observer la dérive du montage (prendre un calibre
d’observation adapté). Jouez sur le réglage du potentiomètre multitour pour annuler au mieux
cette dérive (si vous utilisez le montage de droite, commencez par un réglage grossier avec le
potentiomètre de 100 kΩ, puis affinez le réglage avec le potentiomètre ≈
1 kΩ).
1.3 Sondes à effet Hall C’est l’instrument le plus utilisé pour la mesure des
champs magnétiques. Le principe de l’effet Hall est rappelé brièvement en annexe (on peut
aussi se reporter à la réf. (2), p. 96). On peut montrer le principe de l’effet Hall à l’aide d’un
échantillon de semi-conducteur → se reporter au montage « Semi-conducteur ».
1.4 Manipulation On propose d'étudier quelques caractéristiques des différents
systèmes de mesures en mesurant le champ créé par un électro-aimant à pièces plates ou
tronconiques. L’électroaimant peut être réalisé a l’aide de transformateurs démontables type
Leybold ou Phywe.
100 k
Ω
multitour
-U
alim
C
R
∞
∞∞
∞
+
_
V
S
≈
1 k
Ω
monotour
100 k
Ω
monotour
-U
alim
C
R
∞
∞∞
∞
+
_
V
S
K
K
250 Sp 250 Sp 250 Sp 250 Sp
I I
pièces plates
(champ ≈ homogène)
pièces tronconiques
(champ ≈ inhomogène)

225
Précautions : Lorsqu’on alimente l’électro-aimant, les pièces polaires peuvent se coller
ensemble si elles sont mal fixées → les fixer fortement et tester l’électro-aimant en charge
avant d’insérer les sondes de mesures dans l’entrefer. Pensez aussi à brancher les bobines
de façon à ce que leur champ s’ajoute (on peut le vérifier à l’aide des plaques de visualisation
des lignes de champ).
Manipulation : Mesurez le champ magnétique dans chaque cas en utilisant successivement
les appareils suivants : La balance de Cotton
Le fluxmètre électronique (à monter) avec la bobine de 566 cm
2
(prendre C = 1 µF au minimum et choisir R en fonction de B).
Le Teslamètre Phywe (utilise une sonde à effet Hall).
Pour le fluxmètre, la mesure de la tension V
S
peut se faire de deux façons. On peut utiliser un
oscilloscope en mode ROLL (cf. § 1.2.2) ou un multimètre numérique. La mesure d’une
tension à l’oscilloscope est moins précise qu’avec un multimètre mais la visualisation
temporelle du signal permet de mieux repérer la tension à mesurer. La mesure au multimètre
peut être plus délicate à cause de l’instabilité du signal due aux problèmes de dérive. A vous
de choisir la méthode qui vous convient le mieux.
Conclusion : Les mesures doivent se recouper compte tenu des incertitudes pour un champ
homogène, pas pour un champ inhomogène. La balance de Cotton et le fluxmètre mesurent
B
r
dans un grand domaine alors que la sonde de Hall effectue une mesure locale.
Remarque : La balance de Cotton permet une mesure absolue de B, mais son mode opératoire
est long et la mesure n'est pas locale → on la présente juste à titre indicatif. Le fluxmètre
électronique effectue aussi une mesure moyenne (grande surface). Son inconvénient majeur
est d'être sensible à la dérive mais il est particulièrement utile lorsque l’on veut mesurer le
champ au sein d’un matériau (cf. § sur le ferromagnétisme).
La sonde à effet Hall est un instrument fiable, elle permet une mesure ponctuelle
mais nécessite un étalonnage préalable. Il faut savoir que la quasi-totalité des mesures de
champs magnétiques en pratique sont effectués avec cet appareil → on n'utilisera
pratiquement que lui.
II CHAMP MAGNETIQUE CREE PAR DES BOBINES Plusieurs études sont possibles
suivant le matériel à votre disposition : champ créé par un solénoïde long, champ créé par des
bobines plates. On s’intéressera ici au deuxième cas de figure. Considérons donc une bobine
plate circulaire de rayon R possédant N spires ; le champ B créé suivant l’axe perpendiculaire
à sa surface a pour expression :
2/3
2
o
R
x
1
R2 IN
B(x)
−
+
µ
=
R
O
x
x
B
r
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%