rapport PDF

Thomas Benseghir & Lydie Luengo
Master 2 Mathématiques, spécialité Automatique
Année Universitaire 2010-2011
PROJET M2 :
DEBRUITAGE D'IMAGE
PAR METHODES
VARIATIONNELLES

1. Introduction ................................................................................................................................3
2. Les différents Algorithme ............................................................................................................3
2.1. Chambolle ...........................................................................................................................3
2.1.1. Principe .......................................................................................................................3
2.1.2. Algorithme ...................................................................................................................3
2.1.3. Critère d’arrêt ..............................................................................................................4
2.1.4. Résultat numérique .....................................................................................................5
2.2. Nesterov ..............................................................................................................................6
2.2.1. Principe .......................................................................................................................6
2.2.2. Algorithme ...................................................................................................................6
2.2.3. Résultats numériques ..................................................................................................7
2.3. Passage à l’ordre 2 ...............................................................................................................7
2.3.1. Chambolle ordre2 ........................................................................................................7
2.3.2. Nesterov 2 ................................................................................................................ 10
3. Rapidité de convergence ........................................................................................................... 10
4. Passage image couleur .............................................................................................................. 13
4.1. Preuve ........................................................................................................................... 13
4.2. Test numérique ................................................................................................................. 14
Bibliographie .................................................................................................................................... 15

1. Introduction
Le débruitage il
des phénomènes comme le bruit, le flou,
our but
plus authentique.
a pour
objectif de diminuer le starcaising que déclenche ROF sur les images. Nous pourrons remarquer
flou.
2. Les différents Algorithme
2.1. Chambolle
2.1.1. Principe
Dans le modèle de ROF (Rudin,Osher et Fatemi ) une image se décompose en deux parties la
partie qui correspond au bruit et la partie dite "régulière" noté . Le but sera alors de
minimiser le bruit à l'aide de la variation total d'ordre 1. On se placera alors avec et
gradient de . Où sera un espace euclidien de avec M et N le nombre de lignes et de
colonnes de notre images.
(Chambolle, 2004) permet de minimiser une énergie définit comme
suit :
(1.1)
Avec : notre image de taille , u l’image projetée, l’espace euclidien et
la variation total d’ordre 1.
2.1.2. Algorithme
La solution de (1.1) est donnée par :
Avec : le projecteur orthogonal sur c'est à dire est solution du problème de
minimisation suivant :
Qui se résout grâce aux algorithmes ci après :
Chambolle sans le max :

Chambolle avec le max :
2.1.3. Critère d’arrêt
(Chambolle, 2004).
on a :
Avec le produit scalaire
Par linéarité de la divergence
On sait de plus que avec
ie :
Par linéarité du gradient
De la même manière que dans (Chambolle, 2004)
majorant pour cela nous inversons les signes.
Or on sait que on a avec
et donc ici on a ce qui revient à .
On peut alors écrire :
:

2.1.4. Résultat numérique
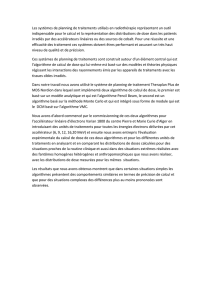
Les tests ont été effectués sur une image bruitée avec un bruit gaussien.
Nous avons utilisé les algorithmes précédent avec un et nous obtenons des résultats
starcaising(on observe que
morceau ).
(en haut image bruité,à gauche Chambolle sans le max et à gauche Chambolle avec le max )
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%