Devoir non surveillé n 08 (pour le 27 janvier 2016) 1 Transformateur

Lycée Naval, Spé 2.
Devoir non surveillé n◦08 (pour le 27 janvier 2016)
1 Transformateur réel
On étudie un transformateur monophasé 220 V/110 V de puissance apparente
500 VA.
Ce transformateur est alimenté au primaire en 220 V sous 50 Hz.
s
2s
longueur
l
longueur
l
enroulement enroulement
primaire secondaire
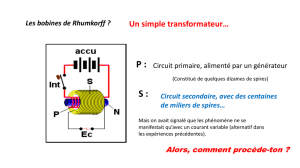
Pour réaliser ce transformateur, on utilise le circuit magnétique représenté ci-
dessus.
On admet que la section du tube d’induction est s= 8,0 cm2et que la longueur de
la ligne de champ magnétique moyenne (en pointillé sur la figure) est l= 25 cm.
Les tôles utilisées, non saturées, ont les caractéristiques suivantes : perméabilité
relative µr= 3,1×103, masse volumique 7,2×103kg.m−3.
1. Sachant que le primaire est alimenté par une tension de 220 V de fréquence
50 Hz, déterminer le nombre N1de spires du primaire pour que, dans le fer,
le champ magnétique soit de un tesla. En déduire N2. Combien faudrait-il
de spires si la fréquence valait 400 Hz ?
2. Modèle du transformateur réel :
On cherche maintenant à représenter un modèle linéaire de ce transformateur
réel. Par rapport au transformateur idéal étudié en cours, on souhaite tenir
compte :
— du caractère fini de la perméabilité relative µr;
— des pertes par effet Joule dans les enroulements et des pertes fer ;
— des fuites de champ caractérisant la canalisation non parfaite du flux du
champ magnétique par le matériau ferromagnétique.
Chaque effet va être étudié séparément.
(a) Perméabilité finie. Courant magnétisant im:
On considère le schéma suivant pour le transformateur : on appelle N1
le nombre de spires au primaire, N2le nombre de spires au secondaire,
µrla perméabilité magnétique relative du milieu (non infinie !), Φle
flux magnétique à travers la section droite Sdu noyau. On appelle lla
longueur moyenne d’une ligne de champ dans le fer.
On ne tient pour l’instant pas compte des pertes par effet Joule et des
pertes fer.
v1
i1
N1N2
v2
i2
i. En se plaçant en régime forcé à la pulsation ω, montrer que :
v1=jωN1Φ ; v2=jωN2Φ ; N1i1+N2i2=RΦ
avec R=l
Sµ0µr
appelée réluctance du dispositif.
ii. Montrer que la dernière relation peut se réécrire :
i1−Im=−N2
N1
i2
avec Im=v1
jωL1
le courant magnétisant, et L1l’inductance propre
du circuit primaire.
iii. Que vaudrait Impour µr→+∞?
iv. Justifier alors le nouveau schéma proposé pour le transformateur pour
tenir compte de ce courant magnétisant.
L1
v1
i1
im
i2
v2
m
v. Calculer la valeur efficace du courant magnétisant pour le transfor-
mateur réel étudié à la première question.
(b) Prise en compte des fuites de champ :
Les lignes de champ n’étant pas parfaitement canalisées, il existe un flux
de fuite au niveau de chaque enroulement. On suppose que ce flux de
fuite est proportionnel à l’intensité du courant, on peut donc ainsi écrire
au primaire :
1

N1Φ1=N1Φfer +N1Φf=N1Φfer +l1i1
Justifier alors le schéma proposé pour le transformateur compte tenu de
ces fuites de champ :
v1
i1i2
l1
v2
l2
m
(c) Prise en compte des pertes :
Pour tenir compte des pertes fer et des pertes par effet Joule, on ajoute
des résistances r1et r2dues aux enroulements et une résistance RFdue
aux pertes fer :
i2
v2RF
v1
r1r2
m
Pour simplifier l’étude, on privilégie finalement la représentation ci-
dessous pour le transformateur où R2modélise l’ensemble des pertes
dues aux enroulements et L2l’ensemble des fuites de champ.
Cette représentation, qui tient compte des pertes, de la perméabilité finie
et des fuites de champ sera celle utilisée pour la suite de l’étude.
i2
v1RF
R2
v2
im
L1
iF
i1L2
m
transformateur idéal
Justifier qualitativement la possibilité d’une telle représentation.
3. Mesures des caractéristiques du modèle :
(a) Pour le matériau ferromagnétique utilisé, les pertes fer à 50 Hz sont de
2,5 W par kilogramme pour un champ magnétique maximal de 1 tesla.
Calculer les pertes fer au sein du transformateur.
(b) Fonctionnement à vide :
Dans cette partie, le transformateur fonctionne à vide, c’est à dire que
le circuit secondaire est ouvert.
i. Connaissant les pertes fer, déterminer la valeur de la grandeur efficace
du courant IF,v qui traverse RF.
ii. Déterminer le courant I1,v, absorbé à vide par le primaire, ainsi que
le facteur de puissance à vide.
iii. Lors de la réalisation du transformateur, on a mesuré la résistance
des enroulements r1= 0,21 Ω pour le primaire et r2= 0,11 Ω pour
le secondaire.
Déterminer la résistance ramenée au secondaire appelée R2sur le
schéma.
(c) Fonctionnement en court-circuit :
Un essai avec le secondaire en court-circuit a donné les résultats suivants :
I2= 5,0 A et V1= 3,4 V. Déterminer L2ωl’impédance de fuite ramenée
au secondaire.
2 Motorisation auto-focus (extrait CS PSI 2015)
L’autofocus, AF, ou mise au point automatique, permet de régler la netteté de
l’image que donne un instrument d’optique. On s’intéresse dans cette partie à la
motorisation d’un tel système.
L’objectif EF 50 mm 1 :1.8 II, commercialisé fin 1990, possède un micromoteur à
courant continu à aimants permanents.
2.1 Principe d’une machine à courant continu à charge constante
Le rotor est constitué d’un noyau de fer doux, cylindrique, sur lequel sont enrou-
lées Nspires. Chaque spire, représentée sur la figure suivante, est rectangulaire,
de longueur bsuivant l’axe (Oz)vertical ascendant et de largeur a, et est enroulée
sur le noyau parallèlement dans un de ses plans de symétrie. Les Nspires sont
réparties uniformément sur le périmètre du noyau. L’ensemble {noyau + spires}
constitue le rotor. Chaque spire, de résistance Re, est reliée à un générateur de
tension continue Upar l’intermédiaire de deux électrodes Aet Cet est parcourue
par un courant d’intensité iconstante. La position du rotor est repérée par l’angle
θde la base orthonormée directe cylindrique (~er, ~eθ, ~ez). On notera Ω = dθ
dt la vi-
tesse angulaire de rotation du rotor et Json moment d’inertie par rapport à (Oz).
Le rotor est placé dans le champ magnétique stationnaire produit par les aimants
permanents constituant le stator. On admettra que, dans le volume situé entre le
stator et le noyau du rotor, ce champ est radial et de la forme ~
B=B0cos θ~er(avec
B0>0). Le fer doux sera assimilé à un matériau magnétique linéaire, de perméa-
bilité magnétique µ=µrµ0. On négligera tout phénomène d’autoinduction. Le
couplage électromécanique est parfait.
2

On suppose que le rotor entraîne une charge dont le couple résistant est ~
ΓR=
−ΓR~ezoù ΓRest une constante positive. À l’instant t= 0, on a θ(t=0)=0et
Ω(t= 0) = 0.
On rappelle que la valeur moyenne d’une fonction fcontinue et positive sur un
intervalle [a, b]est 1
b−aZb
a
f(x)dx.
1. Dans un premier temps, on néglige les propriétés magnétiques du fer doux
qui est alors assimilé à un milieu non magnétique.
Déterminer, en moyenne sur un tour, le moment par rapport à l’axe (Oz)
du couple électromagnétique subi par le rotor, noté Γem.
2. En fait, un système permet la commutation de Aet Cà chaque demi-tour
du rotor, si bien que le courant icircule toujours dans le même sens. Quel
est ce système ?
Pour quelles valeurs de θy a-t-il inversion du sens du courant parcourant
une spire ?
Montrer alors qu’on a Γem =K0ioù K0est une constante à déterminer en
fonction de a,b,Net B0. Quelle est la dimension de K0?
3. Désormais on prend en compte les propriétés magnétiques du fer doux, qui
sera assimilé à un milieu magnétique linéaire de perméabilité magnétique
µ=µrµ0(avec µr>1). À l’intérieur du noyau, le champ magnétique ~
Bs
créé par le stator est approximativement uniforme et est orienté selon ~ex;
on a ainsi ~
Bs=Bs~exoù Bs>0.
Justifier que les courants rotoriques, parcourant les spires du rotor, induisent
dans le noyau un moment magnétique ~
Mrorienté selon l’axe (Oy). En pré-
ciser le sens. Justifier que ce moment magnétique est proportionnel à l’in-
tensité idu courant dans une spire du rotor. En déduire le couple électro-
magnétique subi par le rotor, noté Γ0
em et montrer qu’il est proportionnel à
i.
On pose Γ0
em =Ki. Comparer les ordres de grandeur de Ket de K0.
4. Déterminer la force contre-électromotrice moyenne einduite dans le rotor
en fonction de Ket Ω.
5. Déterminer, en fonction de K,Reet U, l’expression littérale de la caracté-
ristique Ω = f(Γ0
em)en régime permanent de fonctionnement et à tension
d’induit Uconstante.
6. Déterminer la loi d’évolution Ω(t)pour t≥0. Faire de même pour la loi
θ(t). On posera τ=ReJ
K2et Ωlim =U
K−ReΓR
K2.
7. À la date t=t0, un système d’asservissement vient annuler le courant :
i(t=t0)=0, de façon à ce que le moteur puisse s’arrêter. Déterminer les
lois d’évolution Ω(t)et θ(t)pour t≥t0.
8. Pour faire la mise au point, le rotor initialement immobile doit tourner d’un
angle θmp. À la date tmp,θ(t=tmp) = θmp et le rotor est à l’arrêt. Exprimer
θmp et la durée de mise au point tmp en fonction de ΓR,J,t0,τet Ωlim.
2.2 Application au moteur à courant continu DN12M de la
marque Canon R
1. En vous aidant de la figure ci-dessous, déterminer Ket Repour le moteur
mentionné ci-dessus.
3

2. Toujours en vous aidant de la figure précédente, déterminer le couple de
démarrage ΓDdu moteur.
3. On donne J= 0,24 g.cm2. Calculer Uet τ.
4. Dans les conditions où ΓR
ΓD
= 0,5et U= 3,1 V, déterminer Ωlim puis la
puissance du moteur en régime permanent.
5. Pour une durée de mise au point tmp de l’ordre de 100 ms (ordre de gran-
deur du temps de réponse d’un micromoteur à courant continu associé à
un réducteur de vitesse installé dans un objectif Canon R
), quel angle θmp
peut-on espérer ?
4
1
/
4
100%




![Transformateurs [Mode de compatibilité]](http://s1.studylibfr.com/store/data/001876550_1-64c08ee4d75b6268ef2edecc13c8f4a1-300x300.png)