Mesure et Identification des paramètres électriques et

Contrôle et commande des actionneurs électriques - durée 2h - G. Clerc
Mesure et Identification des paramètres électriques et
mécaniques
1
Plan du cours
• Mesure des paramètres des machines asynchrones à cage d ’écureuil
• Mesure des paramètres des machines synchrones
• Identification des paramètres électriques
• Mesure des paramètres mécaniques

Contrôle et commande des actionneurs électriques - durée 2h - G. Clerc
Mesure et Identification des paramètres électriques et
mécaniques
2
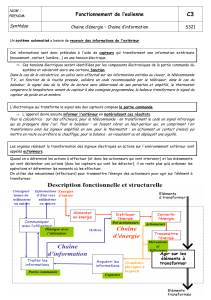
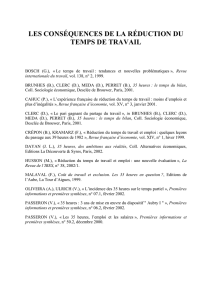
Mesure des paramètres des machines asynchrones à cage d ’écureuil
r
r'
V
X
ω
e
2
g
1
1
I
µ
1
I
I'
2
j
j
l
ω
e
j
l'2
µ
1
R
µ
Deux essais classiques :
•un essai à vide
•un essai à rotor bloqué
Mesure des paramètres pour le régime permanent

Contrôle et commande des actionneurs électriques - durée 2h - G. Clerc
Mesure et Identification des paramètres électriques et
mécaniques
3
Mesure de la résistance statorique
On injecte un courant continu nominal dans un enroulement puis on mesure la tension à ses
bornes. On doit faire une mesure à température ambiante et lorsque le moteur a atteint sa
température d’équilibre.
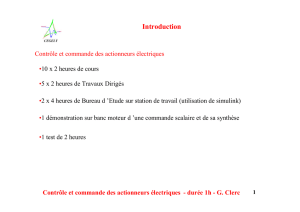
Essai à vide
Caractéristique :
Cette courbe permet de différencier les pertes fer des pertes mécaniques.
L’essai étant fait à vitesse constante proche du synchronisme, les pertes mécaniques qui
dépendent de la vitesse restent constante
Pméca = f(Ω) = cste
L’essai permet de mettre en évidence les variations des pertes fer en fonction de la tension
d’alimentation.
On néglige les chutes de tension dues aux résistances et inductances de fuite du stator. le
glisement est égale à zéro.
)( 2
UfPP mécafer =+

Contrôle et commande des actionneurs électriques - durée 2h - G. Clerc
Mesure et Identification des paramètres électriques et
mécaniques
4
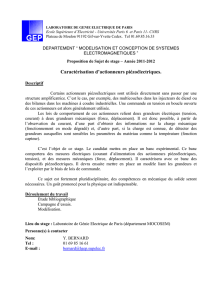
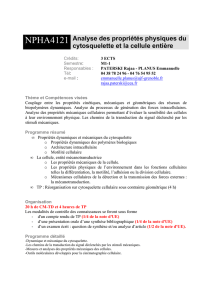
Le schéma devient :
RX
µ
µ
V
1
Pertes
P
0Cu
fer
friction
V
nominal
P - P
+
V1
Pméca P
0
P
PCu
Puissance active mesurée P0
Pertes cuivre
Bilan de puissance
mécarercu PPPP ++=
0
2
01
3IrPcu =
2
010 3IrPPP mécafer −=+
Le prolongement de P
0 - P
cu lorsque la tension tend vers 0 donne les pertes mécaniques
(indépendantes de la tension statorique à vitesse constante)
On peut donc en déduire P0 - Pcu - Pméca = Pfer à la tension nominale et donc Rµ.
Xµ est donné par la puissance réactive.

Contrôle et commande des actionneurs électriques - durée 2h - G. Clerc
Mesure et Identification des paramètres électriques et
mécaniques
5
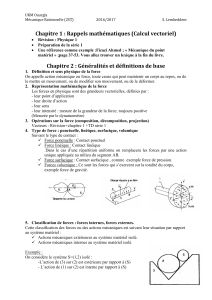
Essai à rotor bloqué
Permet de déterminer la résistance rotorique, les inductances de fuite statoriques et rotoriques.
Le moteur est alimenté sous tension réduite pour que le courant de court-circuit soit égale au
courant nominal. Pour différentes valeur de tension, on relève la puissance absorbée, la puissance
apparente et le courant.
Aucune puissance n’est délivrée sur l’arbre => la puissance absorbée est dissipée dans la
machine. A l’arrêt le glissement vaut 1.
Le schéma équivalent devient :
r + r'
l + l'
1 2 1 2
V1
1
1
I
V
Z=ϕcos.'21 Zrr
=
+
ϕsin.'21 Zll =+
Cet essai ne permet pas de différencier les inductances de fuite statoriques et rotoriques.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%