Une triple stratégie pour réduire la consommation de l`électronique

L’EMBARQUÉ / N°5 / 2014 / 29
Automobile - Microcontrôleurs
A P P L I C A T I O N
Une triple stratégie pour réduire
la consommation
de l’électronique dans les voitures
Face à l’augmentation des niveaux de confort, de sécurité et d’efficacité dans les véhicules,
les constructeurs et leurs fournisseurs de composants doivent répondre à des exigences
contradictoires pour optimiser la consommation d’énergie. Trois stratégies sont mises
en œuvre pour y parvenir : la réduction du nombre de calculateurs intégrés, la minimisation
de la consommation d’énergie des microcontrôleurs et l’activation de la mise sous tension
sélective des fonctionnalités des ECU et des microcontrôleurs.
L
es systèmes électroniques
embarqués dans les auto-
mobiles assurent un niveau
de sécurité et de confort
accru au conducteur et à ses passa-
gers, tout en réduisant l’impact envi-
ronnemental des véhicules. Le
contenu logiciel intégré dans ces
voitures modernes connaît parallèle-
ment une véritable explosion : en
2011, le cabinet Frost & Sullivan esti-
mait par exemple que les automo-
biles utiliseraient à court terme de
200 à 300 millions de lignes de code.
Un véhicule haut de gamme peut
actuellement comporter une cen-
taine d’unités de contrôle électro-
nique (ECU - Electronics Control
Units) pour gérer toutes les fonctions
électroniques, du toit ouvrant élec-
trique au réglage automatique de la
hauteur des phares, en passant par
les capteurs de pluie et la gestion du
moteur (figure 1).
Or, cette prolifération des calcula-
teurs embarqués a des répercussions
sur la consommation d’énergie des
véhicules, laquelle a évidemment un
coût qui peut être directement asso-
cié à la consommation de carburant.
On estime ainsi qu’une consomma-
tion électrique de 100 W équivaut à
une consommation de carburant
supplémentaire de 0,1 litre par
100 km parcourus. De même, on
montre qu’en matière de poids, une
surcharge de 50 kg amène une
consommation additionnelle de
0,1 litre par 100 km parcourus. Ces
deux facteurs suffisent à démontrer
que, pour réduire la consommation
de carburant d’un véhicule, il est
essentiel de minimiser non seule-
ment la consommation d’énergie
électrique, mais aussi le poids des
calculateurs embarqués et l’in-
frastructure électrique associée (en
particulier les torons de câbles).
Au-delà, compte tenu d’autres fac-
teurs tels que la législation et la
volonté d’accroître l’autonomie des
véhicules électriques, la consomma-
tion d’énergie est sans conteste un
critère déterminant dans la concep-
tion des automobiles modernes.
Aujourd’hui, les unités de contrôle
électronique (ECU) sont distribuées
dans tout le véhicule, regroupées par
domaines et reliées par un ou plu-
sieurs bus système – CAN, LIN ou
FlexRay. Dans les prochaines auto-
mobiles, les architectures réseau
seront constituées de contrôleurs de
domaine hautement intégrés, qui
seront interconnectés par l’intermé-
diaire de systèmes à haut débit de
type Ethernet (figure 2). Ces réseaux
du futur seront divisés en domaines
d’application distincts avec des
contrôleurs de domaine associés. Et
ces contrôleurs auront besoin d’une
puissance de traitement considé-
rable, doublée de performances en
temps réel, et de périphériques de
communication.
Réduire le nombre
de calculateurs embarqués
dans un véhicule
Trois méthodes de base permettent
d’abaisser la consommation d’éner-
gie des véhicules automobiles. La
première consiste tout simplement à
diminuer le nombre de calculateurs
2007
Mini
Source : Strategy Analytics
Average ECU per Car
Small Medium Large
60.0
50.0
40.0
30.0
20.0
10.0
0.0 2008 2009 2010 2011 2012 2013 2014 2015 2016 2017 2018
Executive Luxury Coupe
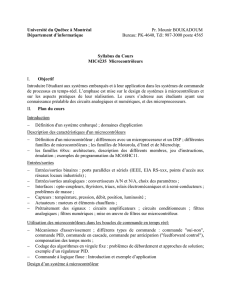
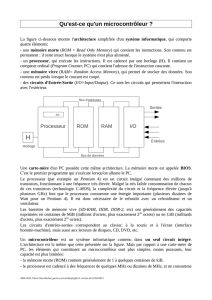
1 NOMBRE MOYEN D’ECU PAR CATÉGORIE DE VÉHICULE
Le nombre de calculateurs (ECU) est en augmentation constante dans les voitures, quelle
que soit leur catégorie, et peut dépasser les 100 sur les modèles haut de gamme.
Andy Birnie,
responsable
ingénierie des
microsystèmes
automobiles,
Freescale
AUTEUR

30 / L’EMBARQUÉ / N°5 / 2014
A P P L I C A T I O N
Automobile - Microcontrôleurs
embarqués dans un véhicule. Pour
cela, il est nécessaire de briser le rap-
port 1 sur 1 qui relie les fonctions
aux contrôleurs, les calculateurs cen-
traux hébergeant alors plusieurs
applications. Cette approche permet
également d’optimiser le coût et la
gestion des options automobiles
dans un environnement de produc-
tion complexe en assurant l’exécu-
tion des fonctionnalités par du logi-
ciel sur une plate-forme matérielle
commune. Cette prise en charge de
plusieurs applications au sein d’une
architecture unique correspond aux
conceptions multicœurs et à l’en-
semble des fonctionnalités associées,
ce que réalise par exemple le micro-
contrôleur MPC5748G de Freescale.
Un haut niveau de séparation et
d’isolation entre les différents cœurs
et les ressources associées permet
alors d’isoler les applications. Ceci
signifie qu’il est possible d’affecter
certaines ressources du microcontrô-
leur – par exemple un cœur, un
sous-ensemble des périphériques et
de la mémoire – à une application
donnée, tandis qu’un autre cœur et
son propre sous-ensemble de péri-
phériques et de mémoire sera affecté
à une application tout à fait distincte.
Autre avantage, cette isolation des
applications assure un haut niveau
de protection aux intégrateurs qui
assemblent les logiciels de différents
développeurs tierces parties en
sachant qu’ils fonctionneront de
manière indépendante et autonome
(figure 3).
En partant de l’architecture du
microcontrôleur MPC5748G, il est
possible d’imaginer un scénario
d’utilisation dans lequel le circuit
pilote deux domaines indépendants
(figure 4). On trouve ainsi un
domaine Autosar (AUTomotive
Open System Architecture) qui gère
les fonctions passerelle et carrosserie
de l’architecture Autosar, qui dispose
d’une unité centrale (CPU) dédiée et
des ressources périphériques et
mémoire associées, et qui fonc-
tionne presque indépendamment du
domaine du routeur IP, mais qui est
capable d’échanger des données en
Diagnostics
Port
Powertrain
Gateway Body and Comfort
Gateway Chassis
Gateway Infotainment
Gateway
CAN/FlexRay
Ethernet Backbone
Transmission
Management
Engine
Management
Battery
Monitoring
Alternator
Regulator
Window
Lift
HVAC
and Comfort
Interior and
Exterior Lighting
Door and
Seat Modules
Steer
by Wire
Brake
by Wire
Power
Steering
Tire Pressure
Monitoring
Head
Unit
Head Up
Display
Navigation
Instrument
Cluster
CAN/LIN CAN/LIN/
FlexRay Ethernet/
MOST/CAN
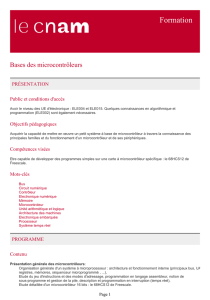
2 RÉSEAUX ÉLECTRONIQUES D’UNE VOITURE CLASSÉS
PAR DOMAINES D’APPLICATION
Aujourd’hui, les unités de contrôle électronique (ECU) sont distribuées dans tout le véhicule,
regroupées par domaines et reliées par un ou plusieurs bus système, CAN, LIN ou FlexRay.
Master ID
Protection
Lockable Memory
Protection Regions
Address Range
Privileges
Peripheral Master
ID Protection
Register
Protection
Cores
Memories Peripherals
System Comms
Independent OS
Timer per Core
Process ID/
Core
Privileges Levels/
Core
Individual Isolated
RAM Arrays
Dedicated Flash
Line Buffers
Individual Flash
Block Locking
Independent
Watchddog per Core e200z4 HSM USB OTG
ENET
SDHC
USB SPH
MLB
FlexRay
DMA
Crossbars
System Memoy Protection Unit
SWT
STM
SWT
STM
SWT
STM
e200z4
e200z4
SRAM0
NVM Port
and
Buffers 0
NVM Port
and
Buffers 1
NVM Port
and
Buffers 2
SRAM1
NVM Array
SRAM2
Register Protect
3 x Comparator
1 x INTC
10 x SPI
18 x LIN
3 x PC
2 x ADD
4 x PC
3 x eMIOS
8 x CAN
Bus
Bridge 0 Bus
Bridge 1
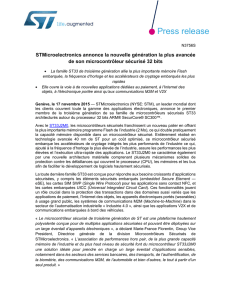
3 MÉCANISMES D’ISOLATION ET DE PROTECTION
Un haut niveau de séparation et d’isolation entre les différents cœurs et les ressources associées permet d’isoler les applications entre
elles, comme on le voit ici sur le microcontrôleur MPC5748G de Freescale.

L’EMBARQUÉ / N°5 / 2014 / 31
Automobile - Microcontrôleurs
A P P L I C A T I O N
toute sécurité via la mémoire parta-
gée et des messages d’interruption.
On trouve parallèlement un second
domaine, le domaine du routeur IP,
qui se connecte à Internet et qui est
conçu pour prendre en charge des
applications telles que la distribution
de téléchargements flash « sur le ter-
rain » au sein du réseau du véhicule.
Ce second domaine, qui utilise un
cœur dédié, une mémoire Ram sys-
tème dédiée et une partie de la zone
de mémoire flash, possède son
propre système d’exploitation avec
ses propres temporisateurs, chien de
garde et ressources système. Pour
répondre à ce type d’architecture,
les microcontrôleurs multicœurs et
multi-applications doivent être déve-
loppés dans des technologies avan-
cées pour répondre aux exigences
de performances demandées. Revers
de la médaille, les concepteurs sys-
tème sont confrontés à un phéno-
mène d’augmentation constante de
la demande en énergie pour
répondre à la complexité des appli-
cations, ce qui va à l’encontre du but
recherché.
Réduire la consommation
des microcontrôleurs
Une seconde approche pour dimi-
nuer la consommation consiste à
travailler sur les différents modes
opératoires des microcontrôleurs
(MCU). Les architectures des généra-
tions précédentes de MCU ne dispo-
saient que de deux états de base :
ON ou OFF. Dans les technologies
avancées, plusieurs modes opéra-
toires doivent prendre en compte les
problématiques de consommation
d’énergie. Notamment les modes
RUN , mode opératoire traditionnel,
généralement gourmand en énergie ;
HALT où tous les éléments du micro-
contrôleur sont alimentés tandis que
le signal d’horloge des différents élé-
ments est coupé (clock gated) ; STOP
dans lequel tous les éléments du
microcontrôleur sont alimentés et un
seul sous-ensemble est opérationnel ;
et VEILLE au sein duquel un seul petit
sous-système est alimenté, alors que
les principaux domaines de l’appa-
reil sont hors alimentation (power
gated). Pour illustrer ce propos, les
microcontrôleurs Freescale de der-
nière génération destinés au marché
de l’électronique de carrosserie sont
par exemple dotés d’un mode
VEILLE, ce qui implique un état d’es-
prit nouveau de la part des déve-
loppeurs pour aborder cette notion
de réduction de la consommation
dans son ensemble. Cette approche
exige par exemple qu’ils créent des
routines spéciales à base de mémoire
Ram pour abaisser au maximum la
consommation d’énergie.
La contribution de Freescale à cette
approche s’est matérialisée par l’in-
troduction d’un concept de gestion
de l’alimentation plus avancé. Avec
AUTOSAR Domain IP Router Domain
Automotive
Gateway
Automotive Body
Control
e200z4 Core
@ 160 MHz e200z2 Core
@ 80 MHz e200z4 Core
@ 160 MHz
HSM
PWM USB
Analog Audio
for «E-Call»
Function
Digital Audio Telephony
for Normal Telephony
ULPI
I2S
SDHC
ADC
CTU
SPI
Timer
LIN
CAN
Ethernet
FlexRay
Ext.
USB
PHY 3G
Modem
Wi-Fi
Ext. Mem
RESET
SW Request
65 µs
65 µs (RAM)
110 µs (Flash)
50 µs
45 µs
< 1 µs
< 2 µs
Recoverable Fault
DRUN
RUN0
HALT0
STOP0
LPU_STOP
RUN1
RUN2
LPU_RUN
STANDBY
SAFE
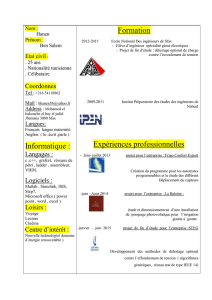
4 FONCTIONNEMENT EN MODE MULTI-DOMAINE
On trouve ici sur le microcontrôleur MPC5748G un domaine Autosar (AUTomotive Open
System Architecture) qui gère les fonctions passerelle et carrosserie de l’architecture Autosar,
et un domaine de routage IP, qui se connecte à Internet.
5 MODES BASSE CONSOMMATION
Ce mode de fonctionnement intégré dans le microcontrôleur MPC5748G permet
de mettre hors tension d’importantes sections du microcontrôleur tout en permettant
à un cœur de fonctionner pleinement.

32 / L’EMBARQUÉ / N°5 / 2014
A P P L I C A T I O N
Automobile - Microcontrôleurs
des innovations qui couvrent deux
domaines.
Le premier a trait à l’introduction
d’une unité dite basse consommation
LPU – Low Power Unit (figure 5). Il
s’agit d’un réel facteur différenciateur
de produits lorsque des performances
opératoires en mode RUN ne sont
pas toujours nécessaires. Ce mode de
fonctionnement « agressif » permet
de mettre hors tension d’importantes
sections du microcontrôleur tout en
permettant à un cœur de processeur
de fonctionner pleinement. Ainsi
cette unité basse consommation, ini-
tialement introduite dans la famille
de microcontrôleurs MPC5748G,
permet au développeur d’applica-
tions de choisir entre plusieurs modes
de fonctionnement, nouveaux ou
traditionnels. Le mode RUN assure
une prise en charge totale du mode
de performances maximales avec
l’ensemble des modules sous ten-
sion. Le mode STOP, quant à lui,
permet de conserver les états de tous
les périphériques. Dans ce mode, les
cœurs (e200z2 et e200z4) sont sous
tension, leur état est maintenu, mais
le signal d’horloge est coupé (tech-
nique du clock gated). Le mode
LPU_RUN, LPU_STOP assure un
mode d’exécution à fréquence
réduite avec seulement un sous-en-
semble des fonctionnalités : CAN,
LIN, SPI, convertisseur A/N, horloge,
etc. D’importantes parties du SoC
sont inactives et mises hors tension
(power gated off) comme, par
exemple, les cœurs principaux, la
mémoire flash ou les boucles PLL.
Enfin, le mode VEILLE, qui requiert
de 8 à 256 Ko de mémoire Ram,
prend en charge la logique de réveil,
les interruptions périodiques auto-
nomes (API), les horloges temps réel
(RTC), les oscillateurs et gère le
sous-système comparateur analo-
gique.
La seconde innovation à mettre à
l’actif de ces architectures de micro-
contrôleur est liée à l’association
d’un comparateur analogique et d’un
temporisateur périodique. En effet,
dans le domaine de l’électronique de
carrosserie, plusieurs scénarios d’ap-
plication exigent simplement un
échantillonnage périodique des bro-
ches d’entrée. Dans le cas d’une
approche traditionnelle, cette solu-
tion n’est possible qu’en passant en
mode RUN. Cependant, en inter-
connectant intelligemment plusieurs
comparateurs analogiques et un tem-
porisateur intégré, cette fonctionna-
lité peut être entièrement obtenue en
mode VEILLE. Ce qui permet d’at-
teindre une consommation d’énergie
peu élevée.
Réduire la consommation
au niveau réseau
Enfin, traditionnellement, le réseau
électronique d’une voiture est ali-
menté et entièrement opérationnel
dès que le contact est mis. Or, cette
mise sous tension n’est pas stricte-
ment nécessaire dans de nombreux
cas de figure. Par exemple, lorsque
le véhicule roule, certaines fonc-
tions, telles que le mouvement des
sièges ou les capteurs de recul,
peuvent être désactivées. C’est ici
que la troisième stratégie de réduc-
tion de la consommation intervient.
Il s’agit de mettre en œuvre les tech-
niques de réseau partiel, de réseau
« soi-disant présent » (pretended) et/
ou d’installer le mode dégradé au
sein d’une ECU basse consomma-
tion. Le réseau partiel permet l’arrêt
complet d’une unité de contrôle
électronique indépendamment des
autres ECU du réseau. L’émetteur-ré-
cepteur de l’ECU se réveillera alors
à la réception d’une commande spé-
cifique envoyée sur le bus. Dans le
cas du réseau soi-disant présent, ce
sont les éléments du réseau qui
déterminent si le niveau d’activité a
diminué de façon significative. Une
fois cette décision prise, les ECU
passent alors en mode basse consom-
mation, avec le microcontrôleur en
mode veille, bien que l’émetteur-ré-
cepteur intelligent « prétende » qu’il
est encore présent sur le réseau. Dès
que l’ECU est sollicitée, le micro-
contrôleur est ensuite rapidement
ramené à son état pleinement opéra-
tionnel.
Enfin, il est aussi possible d’aborder
la question en utilisant l’ECU en
mode dégradé. Dans ce mode, la
flexibilité du microcontrôleur est
pleinement mise en œuvre, les per-
formances correspondant aux
demandes, de sorte que des cœurs
et des périphériques peuvent être
désactivés et la consommation glo-
bale réduite en utilisant des tech-
niques telles que l’échelonnage de
la tension ou de la fréquence. n
1
/
4
100%