TP 5 - Page d`accueil

Les lentilles minces
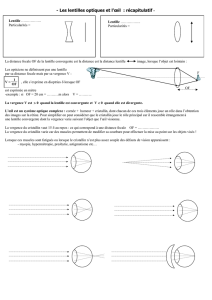
I. Identification rapide du caractère convergent ou divergent d'une lentille
Si les bords sont visibles en absence de monture :
Une lentille à bords épais est divergente, une lentille à bords minces est convergente.
On observe un objet placé à une courte distance de la lentille :
Si son image est plus grande, la lentille est convergente (loupe). Prendre une lentille de vergence V = 10 δ (bord noir).
Si son image est plus petite, la lentille est divergente. Prendre une lentille de vergence V = – 3 δ.
On observe un objet placé à une grande distance devant la distance focale inconnue !
Si son image est droite, la lentille est divergente. Si son image est renversée, la lentille est convergente.
Dans toute la suite de cette feuille, on vérifiera que les différents instruments d'optique sont bien alignés pour respecter les
conditions de Gauss, l’utilisation de rayons paraxiaux.
II. Relations de conjugaison d'une lentille mince
1. Contrainte de distance objet – écran pour obtenir une image réelle sur l'écran
Dans cette manipulation, on utilisera une lentille convergente de vergence V = 5 δ (bord rouge).
Mesurer la taille de l’objet (lettre F par exemple). Si besoin placer le verre dépoli.
Mettre l’objet à une division bien déterminée (20 par exemple) et ne plus le bouger.
• Fixer la distance objet – écran à 70 cm. Déplacer la lentille et constater qu'il n'est pas possible d'obtenir une image
réelle nette sur l'écran. Que dire de l'image A' de l'objet A par la lentille L ?
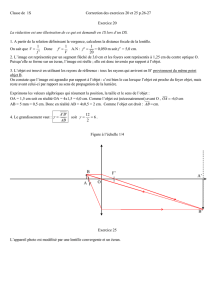
• Fixer la distance objet – écran à D = 120 cm. Déplacer la lentille et constater qu'il existe deux positions de la lentille
symétriques par rapport au milieu de AA' pour lesquelles on observe une image nette sur l'écran.
Observer la taille des images et les comparer à celle de l'objet.
Dans chaque position, calculer le grandissement γ. Calculer le produit des deux grandissements.
Conclure.
• Vérifier que si D = 80 cm = 4f', on observe une image nette sur l'écran renversée et de même taille que l'objet, la
lentille se trouve alors au milieu de AA'.
Pour obtenir une image réelle sur un écran d'un objet réel, la distance objet-écran doit être supérieure à 4f'.
L'image la plus grande est obtenue lorsque la lentille est dans la position la plus proche de l'objet.

FOCOMÉTRIE
I. Méthode d'autocollimation
On place sur le même support une lentille convergente et un miroir plan. Lorsque l'image est nette et située dans le même plan
que l'objet, la distance écran – lentille est égale à f'. L'image est renversée et de même taille que l'objet.
Réaliser le montage avec une lentille convergente de vergence V = 5 δ.
Faire la construction géométrique qui illustre cette méthode. Que dire de l'influence de la position du miroir sur le résultat ?
Conclure sur la précision de cette méthode.
II. Mesure de la distance focale d'une lentille convergente en utilisant la relation de conjugaison
'
OA
1
–
OA
1
=
'f
1
= V et γ =
AB
BA '' =
OA
OA'.
Compléter les dessins en plaçant différemment les foyers objet et image F et F’ de la lentille convergente (5 cas).
On utilisera une lentille convergente de vergence V = 5 δ. On pose p =
OA
, p' =
'OA
.
Á six reprises, choisir une valeur de p puis mesurer celle de p’.
Á chaque fois, en déduire la valeur de la distance focale image f’ puis celles de a et de a’.
Á l’aide d’un tableur Excel ou Latispro, tracer la courbe 'p
1 en fonction de – p
1. En déduire la valeur de f’.
La comparer à f' = 200 mm.
Dans les six cas, évaluer ∆p et ∆p’ puis en déduire la valeur de ∆f’.
Écrire la distance focale image f’ sous la forme f’ = f’
0
± ∆f’.
Vérifier expérimentalement γ en utilisant γ = p
p'.
III. Mesure de la distance focale f' d'une lentille convergente par la méthode de Bessel
L’objet et l’écran sont fixes, on règle la position de la lentille convergente.
Notons D la distance fixe Objet – Écran, supérieure à 4f', et d la distance O
1
O
2
des deux positions de Bessel de la même
lentille L pour lesquelles on observe la netteté sur l'écran de l'image A’ d'un objet A.
Montrer que p
1
=
AO
1
= 2
Df4DD
2
'−+− et p
2
=
AO
2
= 2
Df4DD
2
'−−− . En déduire que f’ = D4
dD
22
−.
Régler D = 100 cm. Déterminer les deux positions O
1
et O
2
. Mesurer d.
En déduire f'. La comparer à la valeur indiquée par le constructeur (f' = 200 mm).
IV. Mesure de la focale d'une lentille divergente par la méthode d'association
On étudie la lentille divergente L
2
de centre optique O
2
et de vergence V
2
. On lui associe une lentille convergente L
1
de centre
optique O
1
et de vergence V
1
. Montrer que si les deux lentilles sont accolées, O
1
confondu avec O
2
, l’ensemble est équivalent à
une seule lentille L dont on donnera la vergence V = V
1
+ V
2
.
On choisit la lentille L
1
pour que la lentille équivalente L soit convergente. On prendra V
1
= 10 δ et V
2
= – 3 δ.
On accolera les deux lentilles en les plaçant sur le même support.
Par une méthode de votre choix, mesurer V puis en déduire V
2
. La comparer à la valeur indiquée. Commenter.
V. Mesure de la distance focale d'une lentille divergente par la méthode de conjugaison
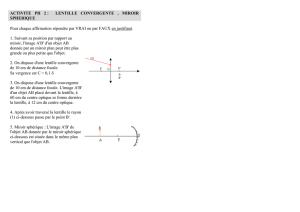
1. Utilisation d’un viseur ou lunette à frontale fixe
Un viseur ou lunette à frontale fixe est constitué de trois « tubes » : le tube T
1
porte l’oculaire, le tube T
2
porte le réticule et le
tube T
3
porte l’objectif. On règle la distance oculaire – réticule en déplaçant T
1
par rapport à T
2
pour voir le réticule net sans
accommoder.
A
B
O
(L)

Un viseur sert à réaliser :
• des pointés longitudinaux, i.e. à mesurer des distances entre divers « objets » suivant son axe optique
• des pointés transversaux, i.e. à mesurer des dimensions transversales d’« objets » perpendiculaires à l’axe optique.
Pour réaliser des pointés longitudinaux :
• On règle l’oculaire pour voir le réticule net.
• On déplace T
3
par rapport à l’ensemble {T
1
, T
2
} de manière à voir nettement et simultanément l’objet visé et le réticule.
Un autre observateur, myope par exemple, peut modifier le réglage de l’oculaire pendant la manipulation mais en aucun cas il
ne doit toucher au réglage de l’objectif valable pour tous les yeux et qui définit la distance de visée fixe D
v
qu’il n’est pas
nécessaire de connaitre.
a. Placer le viseur sur le banc d’optique muni d’un objet éclairé et régler l’oculaire pour voir net le réticule
b. Le viseur étant à environ 20 cm de l’objet, régler l’objectif pour voir net l’objet. On ne touchera plus à ce réglage.
Relever la position du viseur que l’on notera x
A
.
c. Placer sur le banc d’optique la lentille divergente munie d’une gommette entre le viseur et l’objet.
d. Relever les valeurs x
O
et x
A’
de la position du viseur lorsque respectivement la lentille et l’image virtuelle sont vues nettes.
Recommencer plusieurs fois.
e. En déduire les valeurs de p =
OA
et de p' =
'OA
. En déduire la valeur de la distance focale f’ de cette lentille divergente.
f. Faire un calcul d’erreur et écrire la distance focale image f’ sous la forme f’ = f’
0
± ∆f’
2. Utilisation d’un objet virtuel
L'objectif secondaire de cette manipulation est la mise en œuvre d'un
objet virtuel
.
Á l’aide d’une première lentille convergente L
1
, de vergence V = 5 δ, on forme l’image A’ de la source A.
Puis entre la lentille L
1
et le point A’, on intercale une lentille divergente L
2
de centre optique O
2
et de vergence V
2
= – 3 δ.
A’ est une image réelle pour L
1
et un objet virtuel pour L
2
.
2
1
O A
''
–
2
1
O A
'
= V
2
avec
2
O A
'
et
2
O A
''
positifs. Noter les positions de A’, O
2
et A’’.
Déterminer
2
O A
'
et
2
O A
''
. En déduire la distance focale image
2
f
'
de la lentille divergente L
2
.
3. Méthode de Badal
Le but est de déterminer la distance focale objet f’ d’une lentille divergente ou convergente inconnue à l’aide de deux lentilles
convergentes auxiliaires L
1
et L
2
. L
1
est inconnue tandis que la distance focale
'
2
fde la lentille L
2
est parfaitement connue.
Ici, les lentilles L
1
et L
2
sont des lentilles convergentes de vergence respective V
1
= 10
δ
et V
2
= 5
δ
.
La lentille à étudier sera dans un premier temps une lentille divergente de vergence V = – 3
δ
puis dans un deuxième temps
une lentille convergente de vergence V = 2
δ
.
Par autocollimation, former à l'aide de L
1
un faisceau parallèle.
La méthode d’autocollimation permet de ne pas connaître la distance focale
'
1
f.
Seule la réalisation d’un faisceau parallèle nous intéresse.
Placer la lentille L
2
à une distance de L
1
supérieure à
'
2
f
, c’est à dire que le foyer objet F
2
de (L
2
) est entre (L
1
) et (L
2
).
L'image réelle A’ de l’objet réel A à travers les deux lentilles se forme en
'
2
F
sur un écran (E) placé dans le plan focal image de
L
2
. Noter la position de l’écran (E).
Placer la lentille inconnue L, dont on cherche à mesurer la distance focale f’, dans le plan focal objet de la lentille L
2
.
Pour recueillir de nouveau l’image réelle A’ il faut déplacer l’écran d’une distance algébrique D.
Noter la nouvelle position de l’écran et en déduire D.
Montrer à l’aide de la relation de Newton appliquée à la lentille L
2
la relation : f’ = – D
f
2
2
'
.
En déduire la distance focale f’ et la nature de la lentille.
Cette méthode peut – elle s’appliquer à n’importe quelle lentille divergente ? convergente ?
1
/
3
100%