cours ti cnu fip-cpi

COURS TI CNU
Theorie de l’information
Communications numériques
FIP-CPI
Version 2.7
15 mars 2011
Didier Le Ruyet

2

Introduction
Ce cours est consacré aux bases de communications numériques. Pour les lecteurs qui souhaitent
approfondir leurs connaissances, nous recommandons les livres de Proakis [25] et de Benedetto et
Biglieri [2] qui sont les livres de référence dans le domaine. Sur la partie théorie de l’information
nous recommandons la lecture des ouvrages de Battail en français [1], de Gallager [15], MacKay
[21] et de Cover et Thomas [9].
i

ii INTRODUCTION

Chapitre 1
Introduction
L’objectif fondamental d’un système de communication est de reproduire en un point de la
chaîne de communication, soit exactement soit approximativement, un message sélectionné en un
autre point (Claude Shannon 1948) [28].
Le problème qui se pose est que le canal est généralement bruité : comment obtenir une
communication parfaite dans ces conditions ? Dans ce document, nous allons tenter de répondre
à cette question.
Voici quelques exemples de canaux de transmission :
– une ligne téléphonique entre deux modems
– un canal radiomobile entre une station de base et un mobile
– un disque dur
Le dernier exemple montre que le mot point dans la phrase d’introduction peut signifier lieu
ou temps.
La source génère un message à transmettre au destinataire. Celui-ci peut être analogique (pa-
role, son, image, ...) ou numérique (données). Dans un système de communication numérique, le
message analogique devra être converti en numérique avant traitement.
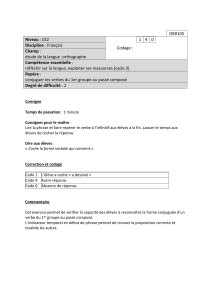
Exemple : le système de communication très simple suivant consiste à transmettre une image
à un destinataire à travers un canal binaire symétrique.
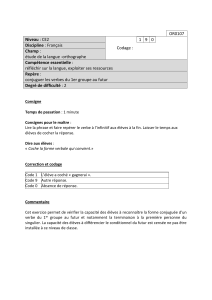
Le canal binaire symétrique est décrit par le modèle de la figure 6.1. Il est défini par sa
probabilité de transition p=P(Y= 0|X= 1) = P(Y= 1|X= 0).
XY
11
1−p
1−p
p
p
00
Fig. 1.1 – Canal binaire symétrique
Sur la figure 1.2, nous présentons un exemple d’image émise puis reçue par le destinataire en
sortie d’un canal binaire symétrique pour p= 0.1. Dans un système de communication il faut
protéger les bits d’information contre les erreurs de transmission tout en limitant le nombre de
bits transmis dans le canal de transmission.
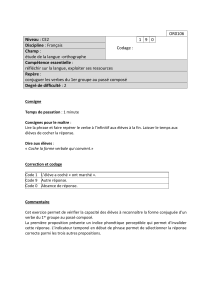
Sur la figure 1.3, nous présentons le synoptique d’un système de communication tel qu’il est
décrit par Shannon.
1
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
1
/
156
100%