Approche bayésienne pour la tomographie des temps de première

!""#$%&'()*+,-.'//'("$0#(1*(
2$3$4#*"&.'(5'-(2'3"-(5'(
"#'3.6#'(*##.7,'(
Jihane BELHADJ--------Thomas-ROMARY---------Alexandrine-GESRET--------Mark-NOBLE--

8$3$4#*"&.'( -.-3.90'
▪La-tomographie-des-temps-de-première-arrivée-a-pour-objectif-de-cartographier-le-modèle-de-
vitesse-de-propagation-des-ondes-sismiques-à-partir-des-temps-de-première-arrivée-mesurés
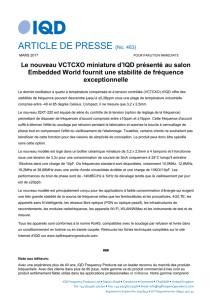
:.40#'; Les-problèmes- direct-et-inverse-en-tomographie-des-temps-de-première-arrivée-relient-un-
modèle-de-vitesse-aux-temps-de-première-arrivée-pointés- (en-ligne-rouge)-sur-un-sismogramme.

<2*"'-(5'(1*(2$3$4#*"&.'(-.-3.90'(
Étapes-de-la-résolution-du-problème-inverse
▪=*("*#*3,2#.-*2.$/ 50(3$561'(5'(7.2'--'; Définir-les-inconnues-du-problème
▪='("#$)163'(5.#'%2 ;((((Calculer-les-données-à-partir-du-modèle-de-vitesse
▪=>./7'#-.$/;((Trouver-un-ou-des-modèle(s)-qui-correspond(ent)-aux-données-observées

?*#*3,2#.-*2.$/
▪Détermination-d’un-nombre-minimal-de-paramètres-(paramètres-principaux)
▪Modèle approximé par une combinaison linéaire m(x) d’un nombre fini de fonctions de base !"
miParamètres du modèle
!"#$%& %'"#$%( )'*%+*"#$%
*
!

?#$)163'(5.#'%2
▪Temps-de-trajet-des-ondes-P-et-S-=>-Équation-Eikonal
Dans-le-cadre-asymptotique-haute-fréquence--
t temps-de-trajet-,s- lenteur
▪En-général,-il-n’existe-pas-de-solution-analytique-à-l’équation-Eikonal
=>-recourir-à-des-méthodes-de-résolution-numérique
Solveur-numérique-pour-un-modèle-de-vitesse--[Noble-et-al.,-2014]-
!𝜕𝑡
𝜕𝑥%2+!𝜕𝑡
𝜕𝑦%2+!𝜕𝑡
𝜕𝑧%2= 𝑠²(𝑥,𝑦,𝑧)!
!"#$ %$ &'( ) *
+"#$ %$ &'!
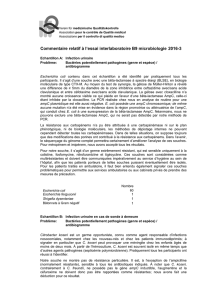
:.40#' Exemple-de-temps-de-trajet-calculés
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%