les capteurs

C
ontrôle de stabilité : les capteurs
ESP les capteurs 1/6
I Capteur de type magnétorésistif ( angle du volant )
- Le capteur volant donne l’information :
- Plusieurs technologies sont utilisées :
1.1 Principe magnétorésistif
-
-
-
- Application sur le capteur d’angle volant :
Deux aimants permanents sont placés sur deux petites roues dentées.
Ainsi, on obtient une tension spécifique pour chaque élément magnétorésistif.
•
•
•
α
β
Capteur volant
aimants
Colonne de direction
Eléments magnétorésistifs
Roues dentées

ESP les capteurs 2/6
II Capteur magnétorésistif ( vitesse de roue )
- Le capteur actif est placé face à un disque multipolaire remplaçant la
couronne dentée. La tension de sortie est indépendante de la vitesse
de rotation, il peut ainsi mesurer des régimes très faibles, voire
proches de l'immobilisation du véhicule.
- Cette caractéristique est également très utile pour d'autres fonctions,
comme le système de navigation ou l'aide au démarrage en côte.
-
-
- Le capteur comportent deux fils :
•
•
-
-
t
emps
en ( ms )
Signal carré
envoyé au calculateur

ESP les capteurs 3/6
III Capteur de type capacitif ( accélération latérale )
3.1 Principe
-
• Une masse ressort
• Une autre masse fixe ( sur le véhicule )
•
•
• La variation de capacité du capteur est analysée et transmise au calculateur.
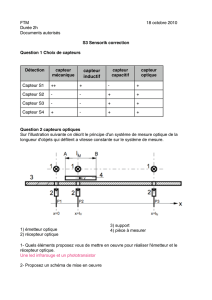
3.2 Fonctionnement de l’élément de mesure d’accélération latérale
- L’accélération latérale subie par le véhicule fait bouger le support du capteur alors que la masselotte gravée
dans le silicium est suspendue par des ressorts et subit cette accélération en retard.
-
-
Masse libre
sur ressort
Masse fixée
sur le véhicule
Mouvement latéral du véhicule

ESP les capteurs 4/6
IV Capteur gyrométrique ( vitesse de lacet )
4.1 Capteur de type gyromètre à vibration ( pour les vitesses angulaires )
-
-
-
-
4.2 Principe de l’élément de mesure du capteur de vitesse de lacet
- Un courant alternatif plongé dans un champ magnétique, créé par un aimant, induit une oscillation (d
1
).
- Cette oscillation étant ( soumise à la vitesse de lacet ) va créer à son tour une oscillation (d
2
) qui représente
donc la vitesse de lacet (Y).
- L’oscillation des deux éléments est mesurée par un accéléromètre du même type que l’élément du capteur
d’accélération latérale.
1 - Ressorts
2 - Masses oscillantes
3 - Capteur d’accélération

ESP les capteurs 5/6
V Capteur gyroscopique de type piézoélectrique ( vitesse de lacet )
5.1 Principe
- Le capteur de lacet mesure la vitesse de rotation du véhicule autour de
son axe vertical. Il est donc généralement situé proche de cet axe, souvent
entre la console centrale et le passage entre les deux sièges avant ( cas
particulier : dans le bloc hydraulique ou sous le siège conducteur ).
- Le gyroscope mesure la vitesse de lacet par calcule des forces de Coriolis.
- Un cylindre avec des éléments piézoélectriques qui créent une onde de
surface à la périphérie ( une vibration de résonance ).
- L’onde est perturbée par la vitesse de rotation.
- La mesure est effectuée en calculant l’effort nécessaire pour restaurer
l’onde originale.
VI Capteur à effet Hall ( accélération latérale )
-
-
-
-
VII Intervention à l’atelier ( remplacement )
-
-
-
b
c
d
a
b
c
e
d
Une plaquette Hall alimentée ( entre 1 et 2 ) et traversée par un champ magnétique B, voit apparaître une tension U
H
entre 3 et 4 .
1
2
3
4
B
U
H
Rappel sur l’effet Hall :
 6
6
1
/
6
100%