2 854 692 03 05566 cc

0
Date de dépôt :
07.05.03.
CD
Priorité :
0 Demandeur(s) :
PEUGEOTCITROEN AUTOMOBILES
SA Société anonyme —
FR.
0 Inventeur(s) :
LEFRANC FRANCIS.
0
Date de mise à la disposition du public de la
demande :
12.11.04 Bulletin 04/46.
CD
Liste des documents cités dans le rapport de
recherche préliminaire :
Se reporter à la fin du
présent fascicule
0
Références à d'autres documents nationaux
apparentés :
Titulaire(s) :
0 Mandataire(s) :
PEUGEOT CITROEN AUTOMOBILES
SA.
CD RÉPUBLIQUE FRANÇAISE
0
N° de publication :
2 854 692
(à n'utiliser ue pour les
INSTITUT NATIONAL
commandes
q
de reproduction)
DE LA PROPRIÉTÉ INDUSTRIELLE
N° d'enregistrement national :
03 05566
PARIS
CD Int CI
7
: G
01 J5/00,
B 60 Q 1/52, B60 R 1/00
DEMANDE DE BREVET D'INVENTION
Al
0 DISPOSITIF D'EXPLORATION OPTIQUE ET VEHICULE COMPORTANT UN TEL DISPOSITIF.
0
L'invention concerne un dispositif d'exploration opti-
que, notamment pour la détection de l'angle mort d'un véhi-
cule, comprenant des premiers moyens (2) de détection
infrarouge thermiques passifs, du type par exemple thermo-
pile, ayant une plage de sensibilité dans un premier interval-
le (11) de longueur d'onde, caractérisé en ce qu'il comporte
des seconds moyens (3) de détection destinés à mesurer
l'énergie solaire directe ou indirecte (5) dans un second in-
tervalle (12) de longueur d'onde, les premiers (11) et les se-
o
cc conds (12) intervalles de longueur d'onde se chevauchant
en partie, et en ce que le dispositif délivre un signal (4) de
sortie qui est fonction des mesures des premiers (2) et des
seconds (3) moyens de détection. L'invention concerne
CNI
également un véhicule comportant au moins un tel disposi-
Q)
tif.
CD
Lii
03
CNI
cc
LL
11111110111111111111111111111111111111111111

2854692
Dispositif d'exploration optique et véhicule comportant
un tel dispositif
L'invention se rapporte à un dispositif d'exploration
optique ainsi qu'à un véhicule comportant un tel dispositif.
5
L'invention concerne plus particulièrement un dispositif
d'exploration optique, notamment pour la détection de l'angle
mort d'un véhicule, comprenant des moyens de détection
infrarouge thermiques passifs, du type, par exemple,
thermopile.
io
Les thermopiles sont des capteurs thermiques infrarouge
ayant une sensibilité en longueur d'ondes comprise par
exemple entre 0 et 14 1..im environ. Ces capteurs passifs
convertissent une température détectée dans une zone de
visée et la convertissent en un signal électrique. Ces capteurs
15 thermopiles mesurent une température absolue, c'est-à-dire
qu'ils n'ont pas besoin de mesurer une variation de
température.
Les documents EP847519 et W09525322 décrivent des
dispositifs d'exploration optique pour véhicules utilisant des
20
capteurs infrarouge du type thermopile.
Un problème rencontré dans l'utilisation de ces dispositifs
réside dans le fait que des détections parasites peuvent être
fréquentes en raison notamment du rayonnement du soleil. En
effet, la source de chaleur diffusée par le soleil et réfléchie par
25
un revêtement routier ou un autre objet peut induire une
détection d'obstacle erronée.
Pour résoudre ce problème, le dispositif décrit dans le
document EP847519 compare les mesures faites dans une ou
plusieurs zones d'exploration avec une zone de référence.
30
Cependant, cette solution n'est pas totalement satisfaisante
car dans certaines configurations de rayonnement direct ou
indirect du soleil, des détections parasites peuvent subsister.

2854692
2
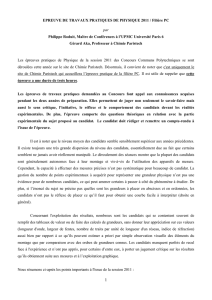
En effet, la figure 1 représente schématiquement, et à titre
d'exemple, un véhicule comportant deux capteurs 1A, 1B
explorant respectivement deux zones distinctes ZA, ZB. En
fonction de la position relative du soleil 5, des capteurs 1A,
5 1B, et des zones de détection ZA, ZB, les mesures thermiques
correspondant respectivement aux deux zones ZA, ZB peuvent
être différentes et représentatives de l'intrusion d'un objet
chaud tel qu'un véhicule. Dans l'exemple représenté, le
capteur avant détecte un objet chaud (rayons du soleil) alors
io que le capteur arrière ne le voit pas. Cette mauvaise fiabilité
de détection reste valable par analogie lorsqu'un seul capteur
explore une ou une pluralité de zones adjacentes.
Une autre solution connue du document W09525322
consiste à ne tenir compte (par filtrage) que des mesures
15 situées au-delà d'un seuil calculé en fonction des conditions
météorologiques. Plus précisément, le seuil est relevé ou
abaissé en fonction du nombre de "bruits parasites" détectés
sur une zone de référence et dans un période de référence.
Cette solution ne résout pas davantage le problème des
20
détections parasites dues à certaines configurations des
rayonnements directs ou indirects du soleil. Par ailleurs, les
solutions qui réalisent un filtre pour supprimer le rayonnement
du soleil s'exposent à une conséquence plus grave qui est la
non-détection d'un objet bien réel. En effet, comme représenté
25
à la figure 2, le rayonnement solaire R émet des signaux dans
la zone O dans laquelle un objet tel qu'un véhicule est
également susceptible d'émettre un rayonnement.
Un but de la présente invention est de pallier tout ou
partie des inconvénients de l'art antérieur relevés ci-dessus.
30
A cette fin, le dispositif d'exploration selon l'invention, par
ailleurs conforme à la définition générique qu'en donne le
préambule ci-dessus, est essentiellement caractérisé en ce
qu'il comporte des seconds moyens de détection destinés à
mesurer l'énergie solaire directe ou indirecte dans un second
35
intervalle de longueur d'onde, les premiers et les seconds

2854692
3
intervalles de longueur d'onde se chevauchant en partie, et en
ce que le dispositif délivre un signal de sortie qui est fonction
des mesures des premiers et des seconds moyens de
détection.
5
Par ailleurs, l'invention peut comporter l'une ou plusieurs
des caractéristiques suivantes :
- au moins une partie du signal de sortie délivré par le
dispositif comprend une soustraction et/ou une comparaison
des signaux représentatifs respectivement de l'intensité
io détectée par les premiers et les seconds moyens de détection
à au moins une même longueur d'onde située dans la partie de
chevauchement des premiers et des seconds intervalles,
- les seconds moyens de détection sont de type
photodiode et/ou phototransistor et/ou photorésistance,
15
-
la plage de chevauchement entre le premier et le second
intervalle de longueur d'onde est comprise entre 0 et 14 tim
environ, et de préférence entre 0 et 8µm environ,
- les premiers et les seconds moyens de détection sont
disposés et orientés relativement de façon à viser
20
successivement ou simultanément une même zone de
détection
L'invention concerne également un véhicule comportant au
moins un dispositif d'exploration conforme à l'une quelconque
des caractéristiques ci-dessus.
25
Selon d'autres particularités avantageuses de l'invention :
- l'axe d'exploration des ondes du dispositif est orienté
sensiblement vers l'arrière du véhicule et forme avec l'axe
longitudinal du véhicule un angle compris entre 10° et 170°
environ, et de préférence de l'ordre de 30 à 50° environ,
30
-
l'axe d'exploration des ondes du dispositif est orienté
sensiblement vers le sol et forme avec l'axe vertical un angle

2854692
4
compris entre 90° et 180° environ, et de préférence de l'ordre
de 100°,
- le véhicule comporte au moins deux dispositifs
d'exploration optique disposés de façon décalée selon sa
5
direction longitudinale,
-
le véhicule comporte au moins deux dispositifs de
détection orientés de façon à viser successivement une même
zone de détection, le véhicule comportant des moyens de
détermination de la vitesse du véhicule, et des moyens de
io traitement de données des signaux de sortie des dispositifs de
détection conformés pour synchroniser les signaux de sortie
des dispositifs de détection en fonction de l'espacement entre
les zones de visée de ces derniers et de la vitesse du
véhicule, pour soustraire ou comparer les signaux et éliminer
15
les objets fixes de la zone de détection,
- le véhicule comporte une pluralité de paires de
dispositifs de détection, les deux dispositifs de détection de
chaque paire étant décalés selon la direction longitudinale du
véhicule et orientés relativement de façon à viser
20
successivement une même zone de détection, les paires de
dispositif de détection étant conformées pour viser des zones
adjacentes et distinctes,
-
le véhicule comporte au moins une paire de dispositifs
de détection, chaque dispositif de détection émettant une
25
pluralité de faisceaux d'exploration, les faisceaux des deux
dispositifs étant associés respectivement en paires de façon à
viser successivement une pluralité de zones distinctes
respectives,
- le véhicule comporte au moins un dispositif de détection
30
de référence, orienté de façon à viser le sol sensiblement
verticalement,
-
les moyens de traitement de données sont conformés
pour comparer la différence des signaux de sortie de deux
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1
/
22
100%