Electromagnptisme

© eivd / FGE
-DPHV&OHUN0D[ZHOO
François GAILLE, professeur
ECOLE D’INGENIEURS DU CANTON DE VAUD
DEPARTEMENT E+I
3K\VLTXH,,
(OHFWURPDJQpWLVPH
François GAILLE, professeur
Yverdon
-
les
-
Bains et La
usanne

(/(&7520$*1(7,60(
Table des matières
I. ELECTROSTATIQUE I-1
1. Notions de base fondamentales I-4
2. Loi de Coulomb I-7
3. Le champ électrique
(
r
et la loi de Gauss I-10
4. Le potentiel électrique I-30
5. Condensateurs électriques I-43
6. Matériaux diélectriques I-55
7. Energie électrique et condensateurs I-63
II. MAGNETOSTATIQUE DANS LE VIDE II-1
1. Notions de base fondamentales II-1
2. Champ d’induction magnétique
%
r
et forces II-3
3. Loi d’Ampère et applications II-13
4. Loi de Biot-Savart et applications II-18
III. INDUCTION ELECTROMAGNETIQUE III-1
1. Expériences d’induction électromagnétique III-1
2. Loi de Faraday et loi de Lenz III-2
3. Forces électromotrices induites et applications III-6
4. Expression généralisée de la loi de Faraday III-8
5. Inductance mutuelle et inductance III-10
6. Energie magnétique et inductance III-14
IV. PROPRIETES MAGNETIQUES DE LA MATIERE IV-1
1. Aimant et champ magnétique terrestre IV-1
2. Magnétisation
0
r
et champ magnétique
+
r
IV-5
3. Matériaux diamagnétiques et paramagnétiques IV-9
4. Matériaux ferromagnétiques IV-10
5. Loi d’Ampère dans la matière IV-13
6. Calcul des circuits magnétiques IV-13
7. Les équations de Maxwell IV-18
8. Introduction aux ondes électromagnétiques IV-21

V. LE COURANT ALTERNATIF V-1
1. Calcul des nombres complexes V-1
2. Etude des fonctions sinusoïdales V-2
3. Tension, courant et impédance complexes V-4
4. La puissance en courant alternatif V-8
5. Deux méthodes de résolution des circuits électriques linéaires en courant alternatif V-12
Références bibliographiques :
1. Physique générale 2, Alonso et Finn, InterEditions, 1992
2. Physique 2, électricité et magnétisme, Resnick-Halliday, Editions du Renouveau pédagogique,
1979
3. University Physics, Young and Freedman, Addison-Wesley Publishing Company, Inc., 1996

I-1
,(/(&75267$7,48(
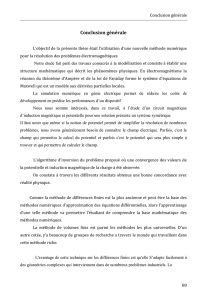
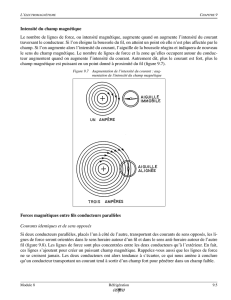
L’électrostatique est l’étude des phénomènes dus aux charges électriques au repos. Comme
le montre la figure de la page suivante, l’électrostatique fait partie d’une théorie plus vaste :
l’électromagnétisme. Avant le génie de James Clerk Maxwell (1831-1879), physicien et scientifique
écossais, les phénomènes électriques et magnétiques étaient séparés et décrits par des théories
distinctes. Maxwell, à travers 4 équations fondamentales dites « Les équations de Maxwell », réunit
sous une même théorie l’ensemble de ces types de phénomènes, aboutissant ainsi à l’unification des
phénomènes électriques et magnétiques. L’électromagnétisme est né.
Dans ce cours, nous allons étudier les différentes relations liant ou reliant les grandeurs
électriques et magnétiques utilisées pour décrire les phénomènes physiques.
Le mot « électricité » provient du mot grec « elektron » qui signifie ambre. Selon l’histoire
des Sciences, le premier scientifique à s’être intéressé aux phénomènes électriques et magnétiques
fut le grand philosophe Thalès de Milet (-625 à –545) né en Ionie (Côte Ouest de la Turquie
actuelle). Ses réflexions portèrent sur des expériences réalisées avec de l’ambre (phénomènes
électriques) et sur la magnétite (phénomènes magnétiques).

1
Gauss
2
Ampère
4
3
Coulomb
Laplace
6 Faraday
7
Ampère-Maxwell
MAGNETISME
FKDPSpOHFWULTXH
(
r
FKDPSPDJQpWLTXH
%
r
GHQVLWpGHFRXUDQW
-
r
FKDUJHpOHFWULTXH
q
7+(25,('(/¶(/(&75,&,7(
FKDUJH
q
GHQVLWpGHFRXUDQW -
r
FKDPSpOHFWULTXH
(
r
FKDPSPDJQpWLTXH
%
r
ELECTROSTATIQUE
(/(&7520$*1(7,60(
5
I
-
2
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
1
/
153
100%