Index I Définition II Cycle de Stirling i Cycle moteur ii Cycle

SORRE Maxime Contrôle continu de thermodynamique L2 – PCSTM
LOYER François Physique 2009 – 2010
1
Index
I Définition
II Cycle de Stirling
i Cycle moteur
ii Cycle récepteur
III Etude du cycle de Stirling
i Points d’équilibres
ii Echanges moteur
iii Echanges récepteur
IV Conclusion
i Avantages et inconvénients
ii Application au solaire
iii Sources
I Définitions
Une machine ditherme est un système thermodynamique permettant de produire du travail ou
une variation de chaleur. Son fonctionnement pourra être représenté par un cycle thermodynamique
sur un diagramme de Clapeyron ou un diagramme isentropique.
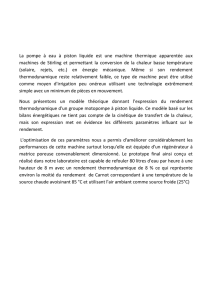
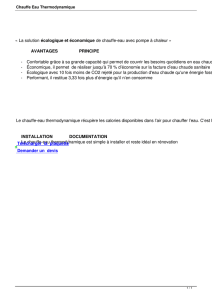
Diagramme de Clapeyron
La machine sera considérée comme moteur si le cycle évolue dans son sens horaire, c'est-à-dire, si
le système utilise les transferts de chaleur afin de produire de l’énergie.
Inversement, si le cycle évolue dans le sens antihoraire, la machine ditherme sera un récepteur
qui permettra un transfert de chaleur en utilisant du travail.
P
V

SORRE Maxime Contrôle continu de thermodynamique L2 – PCSTM
LOYER François Physique 2009 – 2010
2
II Cycle de Stirling
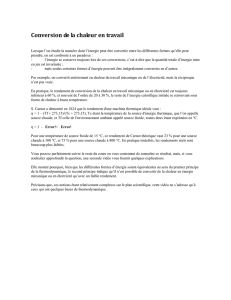
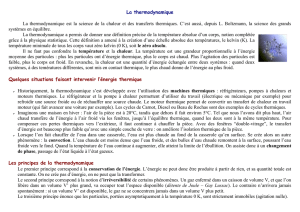
Le cycle de Stirling est caractérisé par 2 isochores (=) et 2 isothermes (=), ce qui se
traduit sur les diagrammes de Clapeyron et entropique :
Diagramme de Clapeyron Diagramme entropique
On rencontrera différentes machines dithermes associées au cycle de Stirling comme le moteur
de Stirling (en cycle moteur) ou la pompe à chaleur (en cycle récepteur)
Les mouvements isochores et les compressions/détentes peuvent êtres symbolisés par deux
pistons distincts : le déplaceur et le moteur.
Le déplaceur assura un mouvement du gaz d’une source à l’autre sans changer le volume.
Le moteur permettra d’opérer les détentes et compressions isothermes, lors des isochores il sera
donc fixe.
moteur de Stirling de type bêta
V
P
T
S
gaz en contact de la source chaude
gaz en contact de la source froide
déplaceur
piston moteur
régénérateur

SORRE Maxime Contrôle continu de thermodynamique L2 – PCSTM
LOYER François Physique 2009 – 2010
3
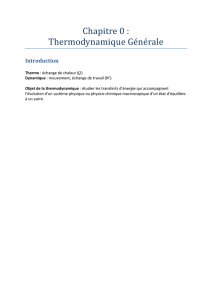
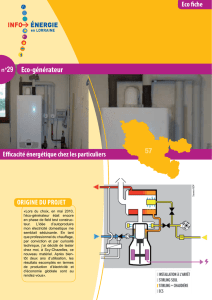
i Cycle moteur
Diagramme de Clapeyron Diagramme entropique
On peut déterminer le signe des échanges de chaleur et travail en observant les variations des
paramètres d’état :
> 0 ( < 0)
> 0 ( > 0) ; = 0 ( = 0)
< 0 ( > 0)
< 0 ( < 0) ; = 0 ( = 0)
Les échanges de chaleurs avec les sources chaude et froide se font lors de l’isotherme, on peut en
effet observer que = ( =)
Les échanges QC et QF ne sont pas dû aux variations de température directe par le chauffage et
le refroidissement isochore mais par le passage dans le régénérateur, couplé aux variations de
chaleur pendant l’isotherme par les sources chaude et froide.
En effet celui-ci est constitué de laine de cuivre, qui est capable d’emmagasiner ou céder de la
chaleur.
Par exemple, lors de la détente isotherme motrice du gaz chaud, le gaz froid n’étant pas passé de
l’autre côté dans le piston de déplacement est aspiré puis chauffé par le régénérateur. Cela permet
d’optimiser le rendement.
V
P
A
B
C
D
WCD
WAB
QC
QF
T
S
A
B
C
D
WCD
QC
QF
WAB
QBC
QDA

SORRE Maxime Contrôle continu de thermodynamique L2 – PCSTM
LOYER François Physique 2009 – 2010
4
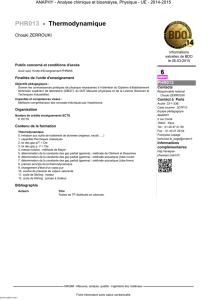
ii Cycle récepteur
Diagramme de Clapeyron Diagramme entropique
< 0 ( > 0)
< 0 ( < 0) ; = 0 ( = 0)
> 0 ( < 0)
> 0 ( > 0) ; = 0 ( = 0)
Le raisonnement est identique à celui fait pour le cycle moteur, le cycle étant parcouru en sens
inverse.
V
P
A
B
C
D
WDC
WBC
QC
QF
T
S
WDC
QC
QF
WBA
QCB
QAD
A
B
C
D

SORRE Maxime Contrôle continu de thermodynamique L2 – PCSTM
LOYER François Physique 2009 – 2010
5
III Etude du cycle de Stirling
On étudiera le cycle de façon réversible fermée, le système est considéré comme un gaz parfait
(= 1,4).
i Points d’équilibres
On connait les valeurs de volume et température en chaque point grâce aux isochores et aux
isothermes, tel que = = = =
Déterminons les relations pression-température et pression-volume pour chaque point grâce à la
loi des gaz parfaits.
A B =
=
=
=
=
B C =
=
=
=
C D =
=
D A =
=
Le simulateur nous donne = 4 ; =300 ; = 0,3
=
= 1,2, ce qui correspond à la valeur lisible sur la simulation.
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%