INTERPRETATION DU ROTATIONNEL EN TERME DE ROTATION

INTERPRETATION DU ROTATIONNEL
EN TERME DE ROTATION
I PRESENTATION DU PROBLEME
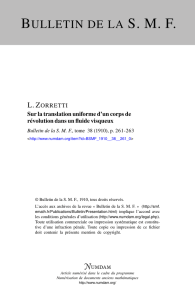
Considérons un fluide en mouvement. Le champ des vecteurs
vitesses est V(M) . Immergeons dans ce fluide une sphère
constituée d’un treillis de tiges métalliques rectilignes
régulièrement espacées dans les trois dimensions. Elles
constituent un découpage de l’espace en petits volumes cubiques.
.O
Le fluide pénètre donc à l’intérieur de la sphère. On peut
considérer le pas de ce treillis comme infiniment petit. Le champ
des vecteurs vitesses des points de la sphère est U(M). Supposons
que la présence de la sphère ne modifie en rien le champ des
vecteurs vitesses du fluide. Supposons un frottement visqueux du
fluide sur la sphère de telle manière que, au point M, l’élément
de volume d
τ
de la sphère soit soumis à la force :
u o
1
df = k
1
V(M) - U(M)
1
d
τ
1
m .
Nous nous posons la question de savoir quel va être le mouvement
de la sphère.
II EQUATIONS DU MOUVEMENT
ΓO
est l’accélération du centre de gravité de la sphère qui est
le point O. U
O
est la vitesse de O (lié à la sphère). Les
équations s’écrivent :
⌠⌠⌠ u o
m
ΓO
= k
1
V(M) - U(M)
1
d
τ
⌡⌡⌡ m .
m 0
⇒
puisque
ΓO
reste fini :
⌠⌠⌠ u o
1
V(M) - U(M)
1
d
τ
= 0
⌡⌡⌡ m .
d
Ω ⌠⌠⌠ --------L u o
I
-------------
= OM
∧
k
1
V(M) - U(M)
1
d
τ
d t
⌡⌡⌡ m .
I 0
⇒
puisque d
Ω
/dt reste fini :
1

⌠⌠⌠ --------L u o
OM
∧1
V(M) - U(M)
1
d
τ
= 0
⌡⌡⌡ m .
III LA MATRICE DIFFERENTIELLE
Cherchons une solution à ces équations. Supposons que
V(O) = U(O) . Supposons que le champ des vecteurs vitesse varie
suffisamment peu sur les dimensions de la sphère, qui est petite,
pour que l’on puisse adopter l’approximation linéaire.
V ( M ) = X i + Y j + Z k V(O) = X
O
i + Y
O
j + Z
O
k
--------L
OM = x i + y j + z k
X
X
O ∂
X/
∂
x
∂
X/
∂
y
∂
X/
∂
z
x
Y=Y
O
+
∂
Y/
∂
x
∂
Y/
∂
y
∂
Y/
∂
z y
Z
Z
O ∂
Z/
∂
x
∂
Z/
∂
y
∂
Z/
∂
z
z
La matrice 3
×
3 s’appelle la matrice différentielle.
∂
X
X
O-------------
0 0 x
∂
x
∂
Y
= Y
O
+
0
-------------
0
y
∂
y
∂
Z
Z
O
0 0
------------
z
∂
z
∂
X
∂
Y
∂
X
∂
Z
0
-------------
-
------------- -------------
-
-------------
x
∂
y
∂
x
∂
z
∂
x
1
∂
Y
∂
X
∂
Y
∂
Z
+
--------------- -------------
-
-------------
0
-------------
-
-------------
y
2
∂
x
∂
y
∂
z
∂
Y
∂
Z
∂
X
∂
Z
∂
Y
-------------
-
------------- -------------
-
-------------
0
z
∂
x
∂
z
∂
y
∂
z
Nous appelons ce terme A, et il correspond à la partie
antisymétrique de la matrice différentielle.
2

∂
X
∂
Y
∂
X
∂
Z
0
-------------
+
------------- -------------
+
-------------
x
∂
y
∂
x
∂
z
∂
x
1
∂
Y
∂
X
∂
Y
∂
Z
+
--------------- -------------
+
-------------
0
-------------
+
-------------
y
2
∂
x
∂
y
∂
z
∂
Y
∂
Z
∂
X
∂
Z
∂
Y
-------------
+
------------- -------------
+
-------------
0
z
∂
x
∂
z
∂
y
∂
z
Nous appelons ce terme S, et il correspond à la partie
symétrique de la matrice différentielle, privée de sa trace.
Interprétons ces différents termes de la matrice différentielle.
IV ROTATION
∂
X
∂
Y
∂
X
∂
Z
-------------
-
-------------
y +
-------------
-
-------------
z
∂
y
∂
x
∂
z
∂
x
1
∂
Y
∂
X
∂
Y
∂
Z
A =
--------------- -------------
-
-------------
x +
-------------
-
-------------
z
2
∂
x
∂
y
∂
z
∂
Y
∂
Z
∂
X
∂
Z
∂
Y
-------------
-
-------------
x +
-------------
-
-------------
y
∂
x
∂
z
∂
y
∂
z
On voit que :
1
---------L --------L --------L
1
---------L
A =
---------------
ro t V(M)
∧
OM =
Ω ∧
OM avec
Ω
=
---------------
ro t V(M)
2
2
A priori, cette structure du champ des vecteurs vitesses,
doit avoir pour conséquence de faire tourner la sphère avec le
vecteur rotation
Ω
.
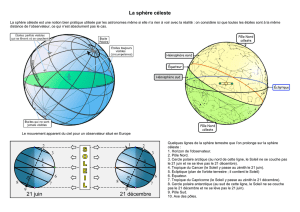
V DILATATION
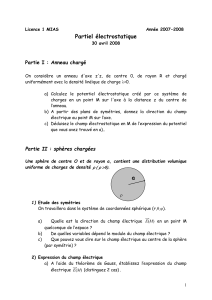
Envisageons le terme correspondant à la trace de la matrice
différentielle, et supposons qu’il agit seul. Considérons un
parallélépipède rectangle solidaire du fluide, et voyons comment
il se déforme au cours du mouvement. La déformation est due au
fait que les sommets sont animés de vitesses différentes à cause
des gradients des composantes de la vitesse.
u-----------------------------------------------------------------------------o
1
u-----------------------------------------------------------------------------o 1
1 1
l
1 .
1 1
1
m-----------------------------------------------------------------------------.
k
h
3

∂
X
h’ = h +
-------------
h dt
∂
x
∂
Y
k’ = k +
-------------
k dt
∂
y
∂
Z
l ’ = l +
-------------
l dt
∂
z
∂
X
∂
Y
∂
Z
V
’ = h’k’l’ = h 1 +
-------------
dt k 1 +
-------------
dt l 1 +
------------
dt
∂
x
∂
y
∂
z
u o
1 ∂
X
∂
Y
∂
Z
1
= h k l
1
1 +
-------------
+
-------------
+
------------
dt
1
1 ∂
x
∂
y
∂
z
1
m .
V
’ =
V
+
V
div V dt
Ainsi, la variation de volume d’un élément du fluide au cours du
mouvement fait intervenir la trace de la matrice différentielle,
qui est ce qu’on appelle la divergence. La sphère étant rigide et
de volume fixé, cette aspect du champ des vecteurs vitesses ne
doit avoir à priori aucune influence.
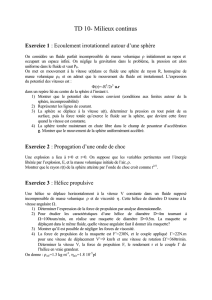
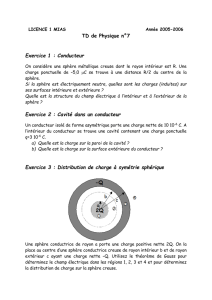
VI DEFORMATION
Considérons maintenant la partie symétrique. Considérons par
exemple le terme
∂
X/
∂
y +
∂
Y/
∂
x . Il va agir sur un carré de côtés
parallèles aux axes des x et des y.
X - X
0
u------------L
1
∂
X
∂
Y
1
X - X
O
=
--------------- -------------
+
-------------
y
1
d
α1
2
∂
y
∂
x
1
y
1
1
1
∂
X
∂
Y
1
Y - Y
O
=
--------------- -------------
+
-------------
x
1
2
∂
y
∂
x
1 I
1 1
1
d
α21
Y-Y
O
.
-----------------------------------------------------------.
O x
(X - X
O
) dt 1
∂
X
∂
Y
d
α1
=
-------------------------------------------------------------
=
--------------- -------------
+
-------------
y 2
∂
y
∂
x
(Y - Y
O
) dt 1
∂
X
∂
Y
d
α2
=
-------------------------------------------------------------
=
--------------- -------------
+
-------------
x 2
∂
y
∂
x
∂
X
∂
Y
d
α
=
-------------
+
-------------
dt
α
=
π
/2 - d
α
∂
y
∂
x
u---------------------------o
1Déforma t i on
1 1
1 1 du c ar r é
1α1
1 1 au coursdu t emps
m---------------------------.
De nouveau, cette déformation ne doit avoir aucune influence sur
la sphère. En résumé, on a décomposé les actions du fluide en une
translation (vitesse V(O)), une rotation, une dilatation, et des
4

déformations, et seul la translation et la rotation doivent agir.
VII SOLUTION POUR LE MOUVEMENT
Nous faisons donc l’hypothèse que la solution pour le mouvement
de la sphère est U
O
= V
O
avec une rotation de la sphère sur
---------L
elle-même avec
Ω
= 1/2 ro t V . Vérifions le :
⌠⌠⌠ u o
1
V
X
(M) - U
X
(M)
1
d
τ
⌡⌡⌡ m .
⌠⌠⌠ u o
1∂
X 1
∂
X
∂
Y
1
∂
X
∂
Z
1
=
1 -------------
x +
--------------- -------------
+
-------------
y +
--------------- -------------
+
------------
z
1
d
τ
= 0
1∂
x 2
∂
y
∂
x
2
∂
z
∂
x
1
⌡⌡⌡ m .
En effet, les facteurs devant x, y, et z, sont constants, et on
intègre autant pour des x positifs que pour des x négatifs. Idem
pour y et z. La première équation est donc vérifiée.
V(M) - U(M) =
∂
X 1
∂
X
∂
Y
1
∂
X
∂
Z
--------------
x +
--------------- --------------
+
-------------
+
--------------- --------------
+
-------------
z
∂
x 2
∂
y
∂
x
2
∂
z
∂
x
1
∂
Y
∂
X
∂
Y 1
∂
Y
∂
Z
--------------- -------------
+
-------------
x +
--------------
y +
--------------- --------------
+
-------------
z
2
∂
x
∂
y
∂
y 2
∂
z
∂
Y
1
∂
Z
∂
X
1
∂
Z
∂
Y
∂
Z
--------------- -------------
+
-------------
x +
--------------- --------------
+
-------------
y +
-------------
z
2
∂
x
∂
z
2
∂
y
∂
z
∂
z
--------L u o
1
∂
Y
∂
Z
2 2
OM
∧1
V(M) - U(M)
1
=
--------------- -------------
+
------------
(y - z )
m .
2
∂
z
∂
y
x
1
∂
Z
∂
X
1
∂
Y
∂
X
∂
Z
∂
Y
+
--------------- ------------
+
-------------
xy-
--------------- -------------
+
-------------
x z +
------------
y z -
-------------
z y
2
∂
x
∂
z
2
∂
x
∂
y
∂
z
∂
y
Chaque terme donne une intégrale triple nulle sur le volume de
la sphère. En effet :
⌠⌠⌠ 2⌠⌠⌠ 2
y d
τ
= z d
τ
par symétrie.
⌡⌡⌡ ⌡⌡⌡
sp h èr e sphèr e
5
 6
6
1
/
6
100%