Une Simple Technique de Contrôle de Courant par Hystérésis d`un

Une Simple Technique de Contrôle de Courant par
Hystérésis d’un Onduleur de Tension à Fréquence de
Commutation Constante
Y.DAILI A.MAKOUF Med-S NAIT.SAID
Laboratoire des Systèmes Propulsion-Induction Electromagnétiques
LSP-IE Batna 05000
[email protected]r a_makouf@yahoo.fr
Abstract-Une nouvelle technique de contrôle de courant par
hystérésis à bande adaptative d’un onduleur de tension triphasé
est présentée dans cet article. La bande d’hystérésis est adaptée à
chaque instant afin de fixer la fréquence de commutation et de
contrôler la position des impulsions de tension, cela permet la
poursuite d’une forme de courant fortement déformé, et minimise
les ondulations dans les systèmes triphasés, ceci est demandé dans
le cas d’un système d’entraînement à haut précision et d’autres
applications.
La méthode prédictive est robuste, utilise un nombre réduit
des composants analogiques conventionnel, donne au contrôleur
l’aptitude de s’ajuster aux déférentes conditions d’opérations.
Dans cet article, la théorie de la méthode est discutée. Les
performances de la technique proposée sont comparées avec les
performances de la technique conventionnelle (à bande fixe) par
simulation, confirme les avantages et les excellentes performances
de la nouvelle méthode de modulation.
Mot clé : contrôleur de courant par hystérésis, fréquence de
commutation.
I. I
NTRODUCTION
Un onduleur de tension ayant un contrôleur de courant,
fournie une dynamique élevée pour la commande de la
machine à courant alternatif. Parce que le courant se relie
directement au développement du couple de la machine. [1],
[2]. Cependant, la structure de la commande comporte des
boucles internes de courants et les performances de système
d’entraînement dépendent en grande partie de la stratégie de
contrôle de courant utilisée.
Donc, le contrôleur de courant doit satisfaire des nécessités
en particulier, contrôle instantané de forme d'onde du courant
et haut exactitude de poursuite.
En effet, trois stratégies de contrôle de courant les plus
communes pour atteindre cet objectif sont : la commande
prédictive [3], la commande à comparaison avec une rampe
[4],et la commande par hystérésis [5].
La commande prédictive consiste à prévoir au début de
chaque période KT de modulation le vecteur de tension en
fonction de vecteur de l’erreur de courant donné à l’instant (K-
1)T et les paramètres de la machine, afin de réduire au
minimum l'erreur de courant [6], [7], mais elle est complexe à
mettre en application, elle exige une bonne connaissance des
paramètres de la machine et une réponse transitoire
relativement faible.
Dans la stratégie de contrôle de courant par comparaison
avec une rampe, on utilise trois compensateurs de erreurs PI
produisant les tensions de références. En accord avec le
principe de MLI sinusoïdale, une comparaison avec un signal
triangulaire produit les signaux de commande de l’onduleur
L’inconvénient principal de cette technique, une erreur
inhérente de poursuite (d’amplitude et de phase) et la réponse
du système peut être affectée par, la stabilité de la boucle de
régulation qui dépend à son tour des paramètres de la charge.
Le contrôle de courant par hystérésis est la technique la
plus simple utilisée pour le contrôle des courant dans les
systèmes d’entraînement à haute vitesse est cela à cause ; la
simplicité à la mise en œuvre, la robustesse, l’exactitude en
poursuite de courant de référence et une dynamique
extrêmement bonne. Cependant, ce contrôleur a les
inconvénients suivants.
1) la fréquence de commutation dépend en grande partie
des paramètres de la machine et la tension de bus continu.
2) dans un contrôleur de courant par hystérésis le courant
instantané est maintenu dans une bande de tolérance, mais dans
le système à neutre isolé l'erreur instantanée peut atteindre le
double de cette bande [8], [9].Cela dû à l'interaction entre les
trois phases.
Beaucoup de recherches ont été faites dans le passé et dans
les années récentes pour éliminer de tels inconvénients et
beaucoup de solutions efficaces ont été proposées [10], qui
améliorent essentiellement les performances de ce contrôleur
au moyen des régulateurs complémentaires

Dans cet article on présente une solution efficace de ces
problèmes, Une technique caractérisée par sa simplicité
d’implémentation et offre touts les avantages de la technique
de contrôle de courant par hystérésis à bande fixe, cette
technique consiste à ajuster la largeur de la bande afin de fixer
la fréquence de commutation. On utilise deux boucles, une
boucle d’action directe (feed-forward) qui assure un
fonctionnement à une fréquence de commutation constante, et
une boucle fermée (feed-back) permet de contrôler la position
des impulsions de tension.
II.
PRINCPE DE FONCTIONNEMENT
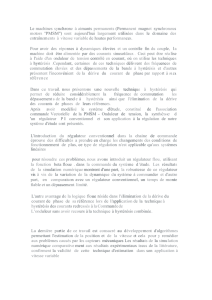
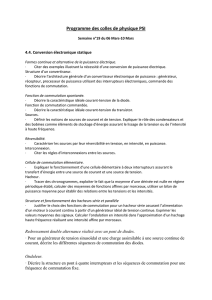
La Fig.1 montre un onduleur triphasé à MLI alimentant
une machine à induction. Où chaque phase de la machine est
représentée par une force contre électromotrice (fém.) en série
avec une inductance et une résistance. Les courants de
référence
(
)
, ,
a b c
i i i
∗∗∗
sont comparés avec les courants de phase
de la machine respectivement
(
)
, ,
a b c
i i i
,
et les erreurs
résultantes à travers des contrôleurs de courants à hystérésis
commandent les interrupteurs de puissance de l'onduleur.
A.
Moteur à neutre connecté au point milieu de la source
d’alimentation
En premier lieu on considère que le neutre de la charge est
connecté au point milieu de l'onduleur (SH fermé). Dans ce cas
on suppose que les trois phases sont symétriques et chaque
phase peut être vue comme indépendante, alimentée par un
onduleur à demi-pont, par conséquent, la relation entre le
courant et la tension peut être exprimée comme.
0 0 0 0
0 0 . . 0 0 .
0 0 0 0
a a
cha cha
b chb chb b
c c
chc chc
u R i L i e
u R i s L i e
u R i L i e
= + +
(1)
Si les courants de références
(
)
, ,
abc
i i i
∗ ∗ ∗
circulent dans la
charge, l’équation (1) devient.
* * *
* * *
* * *
0 0 0 0
0 0 . . 0 0 .
0 0 0 0
a a a a
b b b b
c c c c
u R i L i e
u R i s L i e
u R i L i e
= + +
(2)
Puisque la source de tension et les phases de la machine sont
considérées symétriques, une seule phase peut être considère
lors de l’analyse et le résultat serait généralisé sur les deux
autres phases. Pour la phase « a », la relation entre la tension et
le courant de phase devient.
a
a a a
di
u Ri L e
dt
= + +
(3)
Pratiquement
a
u
peut prendre
2
dc
U
±dépend de l’état des
interrupteurs de demi-pont de la phase « a » .Cependant, si le
courant de référence
a
i
∗
circule dans la charge, donc la tension
a
u
∗
qui correspond à ce courant est donnée par.
a
a a a
di
u Ri L e
dt
∗
∗ = ∗ + +
(4)
Dans ce cas, la tension
a
u
∗
et le courant
a
i
∗
sont des
fonctions sinusoïdales.
La différence entre le courant de charge et le courant de
référence peut être définie comme
a
ε
dont.
a a a
i i
ε
∗
= −
(5)
On soustrait (3) de (4), et en substituant dans (5).
( )
( )
a a
a a a a
d i i
u u R i i L dt
∗ −
∗ − = ∗ − + (6)
d
a
u u R L
a a a
dt
ε
ε
∗− = +
(7)
Pour une fréquence de commutation raisonnablement élevée on
peut négliger l’effet de la résistance, donc (7) devient.
d
a
u u L
a a
dt
ε
∗− =
(8)
Le terme
a a
u u
∗ −
peut être considéré constant pendant une
période de modulation, donc l’erreur
(
)
a
t
ε
a une forme
triangulaire.
L’équation (8) peut être exprimée comme.
2 2
( )
2
dc
a
p
B B
U
u L t
∗
+
− =
(9)
2 2
( )
2
dc
a
p
B B
U
u L T t
∗
− −
+ = − (10)
De (9) et (10), la période de commutation est donnée par.
K
1
K
’
1
K
2
K
’
2
K
’
3
L
R
e
a
L
e
b
L
e
c
2
dc
U
2
dc
U
ia
ib
ic
R
R
Fig. 1. Contrôle des courants par hystérésis dans une machine
CA alimenté par un onduleur de tension
SH

2
4
(1 ( ) )
dc n
LB
TU u
=−
(11)
Avec
/( / 2)
n a dc
u u U
∗
=
est la tension normalisée.
1
2
n
p
u
t T
+
= 1
2
n
n
u
t T
−
=
(12)
L’équation (11) montre que la période de commutation est
exprimée en fonction de la largeur de la bande B et la tension
normalisée n
u
.
Si B est constante et
n
u
varie d’une période à l’autre, donc la
période de commutation T est variable. Pour obtenir une
fréquence de commutation constante
1
r
r
f
T
=, la largeur de la
bande d’hystérésis B peut être modifie suivant l’équation
suivante.
2
.
(1 )
4.
dc r
n
U T
B u
L
= − (13)
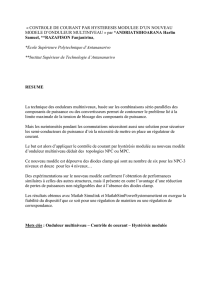
Le schéma de base de ce contrôleur est représenté à la
fig.2. La bande d’hystérésis est obtenue par la somme de
terme
1
B
de la PLL et le terme
2
B
de l’estimateur de la bande.
Le bloc d’estimation de la bande permet de calcule
2
B
qui
est donnée en fonction de
n
u
.Le comparateur à hystérésis est
commun entre deux boucles, possède deux entrées, l’erreur de
courant
( )
a
t
ε
et la bande
B
, produisant deux signaux de
commande complémentaires
q
et
q
.
Avec une estimation idéale de la bande,
2
B
doit être égal à la
valeur théorique de
B
, donnée par (13) qu’est indépendante de
la fréquence de modulation.
Dans ces hypothèses, la bande
1
B
de la sortie de la PLL doit
toujours être nulle, résulte lorsque l’erreur de phase est zéro.
Dans le cas pratique, plus les erreurs de circuit et les
inexactitudes, quelques approximations peuvent être
introduites dans le processus d’estimation afin de permettre
une implémentation simple de bloc de l’estimation .Ainsi, la
PLL peut corrigée cet erreur.
Une simple implémentation de l’estimateur de la bande peut
être dérivée par le réarrangement des équations (12)-(13).
2
2
2 0 0
2 2 2
4 2 1
p n p n
t t t
t
B
T T T
β β
= = − −
(14)
Avec la bande de référence
0
β
est la bande d’hystérésis
nécessaire pour fixer la fréquence de commutation,
2
B
égale
à
0
β
pour une tension de phase nulle, donnée par.
0
.
4.
dc r
U T
L
β
=
(15)
Pour une fréquence de commutation proche à la fréquence désirée
r
f
,
le second terme de l’expression de
2
B
dans (14) peut être approximé
comme suit.
22
2 0
2 1
pn
r r
t
t
B
TT TT
β
≅ − −
(16)
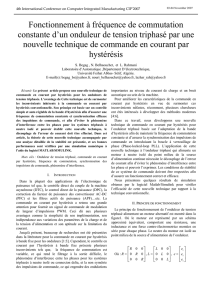
L’implémentation de (16) est simple, comme il est montré dans
la fig. 3. La bande de référence
0
β
est intégrée pendant les
intervalles de temps
p
t
et
n
t
avec un constant du temps égale à
4
r
T
la sortie intégrée
i
U
est remise à zéro à chaque transition
de signale
q
, cela produit une série de triangles, la surface de
Détecteur de phase
Horloge
PI
FILTER
Comparateur
A
Hystérésis
q
q
r
f
Vers l’onduleur
PLL
Estimateur
De la
Bande
FILTER
2
B
1
B
B
a
i
∗
a
i
a
ε
+
- +
+
f
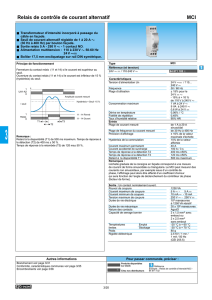
Fig.2.Schéma bloc d’un contrôleur à hystérésis avec synchronisation d’impulsions par la PLL

chaque une est proportionnelle à
p
t
et
n
t
comme montre la fig.4,
un filtre passe bas donne
f
U
la valeur moyenne de
i
U
pendant
une période de modulation T .
L’utilisation de la PLL pour la synchronisation est dérivée de
celle utilisée en télécommunication ou la synchronisation des
signaux est souvent nécessaire. Le principe de la PLL est
donné par la partie supérieure de la fig. 2. Un détecteur de
phase reçoit les impulsions de commande de l’onduleur et le
signal de synchronisation, émet un tension continue modulée
telle que la longueur des créneaux et leurs signes dépendent de
l’écart de phase de ces deux trains d’impulsion, cette tension
modulée et filtrée pour obtenir une tension analogique continue
qui représente l’erreur de phase et peut donc jouer le rôle de la
bande correctrice
1
B
. Lorsque les fréquences
f
et
r
f
sont
égales l’écart de phase est nul ainsi
1
B
égale à zéro, on dit que
le système est verrouillé
B. Moteur avec neutre isolé du point milieu de la source
d’alimentation
Puisque les charges à courant alternatif sont normalement
branchées en étoile avec neutre isolé (SH ouvert), l'analyse
précédente doit être modifiée pour tenir compte de la tension
du neutre.
Dans ce cas, l’équation de charge pour la phase « a », s’écrit
sous la forme suivante.
. .
0
dia
u L R i e u
a a a
dt
= + + +
(17)
Où
0
u
: est le potentiel du neutre par rapport au point milieu
de bus continu. Son expression est donnée comme suit.
03
abc
u u u
u
+ +
= (18)
L’équation qui permet de donner l’erreur est modifiée
.
*
( )
* *
. .( )
0
d i i
a a
u u L R i i u
a a a a
dt
−
− = + − −
(19)
A cause de la présence de
0
u
, l’erreur de courant durant une
période de commutation n’est pas triangulaire, car sa pente
pour chaque phase dépend de l’état de toutes les autres phases
par
0
u
, on appelle ce phénomène : phénomène d’interférence de
phases. Pour éviter ce phénomène, il faut agir directement sur
l’erreur de courant en ajoutant un terme additionnel de
découplage et l’erreur de courant est écrite comme.
a a a a a
i i
ε ζ γ
= ∗ − = +
(20)
a
ζ
:
Erreur de courant découplé.
a
γ
:
Terme de découplage.
On l’appelle erreur de courant découplée, car il est possible de
définir une équation dynamique pour cette erreur
a
ζ
ne
dépendant plus de
0
u
, et dite découplée car l’erreur
a
ζ
pour une
phase donnée ne dépend que de la tension correspondante à
cette phase, et correspond à celle du monophasé.
L’équation (19) peut être décomposée en deux parties comme
suit :
.
a
a a a
d
u u L R
dt
ζ
ζ
∗ − = +
(21)
0
.
a
a
d
u L R
dt
γ
γ
= +
(22)
L’équation (21) montre que
a
ζ
ne dépend que de la tension
correspondante à cette phase
a
u
, cette expression est similaire à
(7). Par conséquent cette équation peut être considérée comme
l’erreur
a
ε
dans le cas du neutre relié au point milieu de bus
continu.
Pratiquement pour réaliser le terme de découplage (équation
(22)), il faut implanter un filtre qui permet de filtrer la
tension
0
u
.
2
β
Intégrateur
Détecteur des
transitions
0
β
Filtre
q
-
+
Fig.3. Schéma bloc de l’estimateur de la bande
f
U
i
U
S
q
S
t
t
i
U
f
U
t
T
p
t
n
t
p
t
n
t
Fig.4. Quelques formes de signaux de bloc d’estimation

III.
RESULTATS DE SIMULATION
La technique proposée a été étudie par simulation, afin de
vérifier l'analyse théorique. En utilisant les Paramètres de
simulation suivants : Paramètres de la charge connectée en
étoile à neutre isolé :
10
L F
µ
=
;
1
R
= Ω
;
( ) 95 sin( )
e t t
ω α
= +
.
L’onduleur : f=4Khz ;
250
d
U V
=
.
Les fig. 5 et 6 montrent les résultats obtenus par simulation
pour les deux stratégies de commande, la commande par
hystérésis prédictive et la commande par hystérésis à bande
fixe respectivement. Nous remarquons que la technique de
commande par hystérésis conventionnelle (à bande fixe) est
capable de régler l’amplitude du courant. Mais L’erreur
instantanée de courant peut atteindre le double de la bande de
tolérance cela dû à l'interaction entre les trois phases. Le
changement d’état de comparateur d’une phase influence les
tensions dans les deux autres phases. La fréquence de
commutation est fortement variable.
Par l’utilisation de la méthode de commande proposée, nous
avons constaté que l’erreur de courant est maintenue dans la
bande d’hystérésis qu’est variable est cela grâce au découplage
de l’erreur du courant, une grande amélioration par rapport à la
commande par hystérésis à bande fixe, la qualité du signal de
courant est améliorée et les spectres d’harmoniques associes à
ce signal sont réduits parce que la fréquence de commutation
se stabilise auteur de la fréquence désirée et par conséquent le
taux d’harmoniques de distorsion diminue de 2.52% à 1.95%
IV.
C
ONCLUSION
Cet article a présenté une nouvelle technique de contrôle de
courant par hystérésis adaptative qui s'avère particulièrement
simple, permet à la fois, de fonctionner à une fréquence de
commutation constante, et de centrer les impulsions de tension
de l’onduleur, Cette technique de commande permet de
donner au système une grande vitesse de réponse et l’erreur de
la largeur de bande peut être éliminée rapidement, de ce fait
,en reprenant la synchronisation des impulsions de tension. Les
performances de cette technique ont été vérifiées par
simulation numérique.
R
EFERENCES
[1] B.K.Bose, “Adaptive hysterisis-band current control technique of
voltage-fed PWM inverter for machine drive system” IEEE Trans. Ind.
Electron, vol.37, pp. 402–408, October 1990.
[2] K.M.Rhman, M.R.Khan”Variable-band hysterisis current controllers for
PWM voltage-source inverter” IEEE Trans. . Power Electron, vol.12,
pp. 964–970, November 1997.
[3] H.Le-Huy L.A.Dessaint “Adaptive Scheme For PWM Synchronous
Motor Drives: Analysis and Simulation”IEEE Trans. Power Electron
vol. 4, Oct. 1989, pp. 486–495.
[4]
D.M.Brod D.W.Novotny, “Current Control of VSI-PWM Inverters”
IEEE Trans. Ind. Applicat.Vol 21 , May. 1985, pp. 562– 570.
[5] P.Freere P.Pillay,”Systematic design of perma- nent Synchronous Motor
Drive”IEEE IAS-90 1990, pp.373– 380
[6] G. Pfaff, A. Weschta, and A. Wick, “Design and experimental results of
a brushless ac servo drive,” IEEE Trans. Ind. Applicat., vol. IA-22, pp.
814–821, July/Aug. 1984.
[7] L. Zhang and F. Hardan “Vector controlled VSI-fed AC drive using a
predictive space-vector current regulation scheme,” in Proc. IEEE
IECON’94, 1994, pp. 61–66.
[8] D. M. Brod and D. W. Novotny, “Current control of VSI-PWM
inverters,” IEEE Trans. Ind. Applicat., vol. 21, pp. 562–570, July/Aug.
1985.
[9] L. Malesani and P. Tenti, “A novel hysteresis control method for current
controlled VSI PWM inverters with constant modulation frequency,”
IEEE Trans. Ind. Applicat., vol. 26, pp. 88–92, Jan./Feb. 1990.
[10] L.Malesani and all “Digital Adaptive Current Control with Clocked
Commutations and Wide Operating Range”, IEEE Trans Ind Applicat,
Vol.32, pp.316-324 March/April 1996,
 6
6
1
/
6
100%