Fonctionnement à fréquence de commutation constante d`un

4th International Conference on Computer Integrated Manufacturing CIP’2007 03-04 November 2007
Fonctionnement à fréquence de commutation
constante d’un onduleur de tension triphasé par une
nouvelle technique de commande en courant par
hystérésis
S. Begag , N. Belhaouchet, et L. Rahmani
Laboratoire d’Automatique ,Département D’électrotechnique,
Université Ferhat Abbas- Sétif, Algérie.
E-mail(s): begag_bs@yahoo.fr, nouri_belhaouchet@yahoo.fr, lazhar_rah@yahoo.fr
Résumé- Le présent article propose une nouvelle technique de
commande en courant par hystérésis pour les onduleurs de
tension triphasés. L’avantage de Cette technique est de surmonter
les inconvénients inhérents à la commande en courant par
hystérésis conventionnelle. Son principe est basée sur un contrôle
simple et auto réglable de la bande d’hystérésis afin d’assurer une
fréquence de commutation constante et synchronisation efficace
des impulsions de commande, et afin d’éviter le phénomène
d’interférence entre les phases pour les systèmes triphasés à
neutre isolé et pouvoir établir cette nouvelle technique, le
découplage de l’erreur de courant doit être effectué. Dans cet
article, la théorie de cette nouvelle technique accompagnée par
une analyse détaillée de la stabilité est présentée, et ses bonnes
performances sont vérifiées par une simulation numérique à
l’aide du logiciel MATLAB/SIMULINK.
Mots clés : Onduleur de tension triphasé, commande en courant
par hystérésis, fréquence de commutation, synchronisation des
impulsions de commande, phénomène d’interférence.
I. INTRODUCTION
Dans la plupart des applications de l’électronique de
puissance tel que, le contrôle direct du couple de la machine
asynchrone (DTC), le control direct de la puissance (DPC), la
correction du facteur de puissance des convertisseur AC-DC
(PFC) et les filtres actifs de puissance (APF)…etc. La
commande en courant par hystérésis a retenu une grande
attention pour fournir un signal de commande de modulation
de largeur d’impulsions PWM. Ceci dû aux plusieurs
avantages comme la simplicité de son implémentation, son
indépendance aux variations des paramètres de la charge et de
la tension d’alimentation et son aptitude sur la limitation du
courant.
Jusqu'à présent, beaucoup de recherches ont été présentées
dans la littérature pour la commande en courant par hystérésis
à bande fixe pour les onduleurs [1:3]. Cependant, le contrôle en
courant par l’hystérésis à bande fixe présente plusieurs
inconvénients tels que, la fréquence de commutation est
variable, ce qui rend le filtrage à la sortie difficile, le
phénomène d’interférence entre les phases pour les systèmes
triphasés à neutre isolé ou connexion delta, et la non symétrie
des impulsions de commande, ce qui engendre des ondulations
importantes au niveau du courant de charge et un bruit
acoustique au sein de la machine.
Pour améliorer les caractéristiques de la commande en
courant par hystérésis en vue de surmonter ces
inconvénients néfastes, récemment, plusieurs chercheurs
ont étés intéressés à développer des méthodes modernes
[4:6].
Dans ce travail, nous développons une nouvelle
technique de commande en courant par hystérésis pour
l’onduleur triphasé basée sur l’adaptation de la bande
d’hystérésis afin de maintenir la fréquence de commutation
constante et d’assurer la synchronisation des impulsions de
commande en introduisant la boucle à verrouillage de
phase (Phase-locked-loop PLL). L’application de cette
nouvelle technique à l’onduleur triphasé qui alimente un
moteur à neutre isolé du point milieu de la source
d’alimentation continue nécessite le découplage de l’erreur
de courant afin d’éviter le phénomène d’interférence entre
les phase et pouvoir l’exprimer. Les conditions de stabilité
de ce système de commande doivent être respectées afin
d’assurer un fonctionnement correct et efficace.
Nous présentons quelques résultats de simulation
obtenus par le logiciel Matlab/Simulink pour vérifier
l’efficacité de cette nouvelle technique par rapport à la
technique conventionnelle.
II. P
PR
RI
IN
NC
CI
IP
PE
E
D
DE
E
F
FO
ON
NC
CT
TI
IO
ON
NN
NE
EM
ME
EN
NT
T
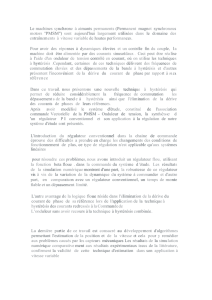
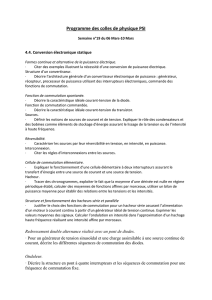
Le principe de fonctionnement de l’onduleur de tension
triphasé alimentant un moteur alternatif est montré dans la
figure1. Où le moteur est représenté par un schéma
approximé équivalent, comportant une résistasse, une
inductance et une force contre-électromotrice montées en
série pour chaque phase. Le neutre du moteur est isolé au
point milieu de la source d’alimentation de l’onduleur.
Où :
00
00
00
R
RR
R
=
,
00
00
00
L
LL
L
=
,
1
2
3
e
ee
e
=

4th International Conference on Computer Integrated Manufacturing CIP’2007 03-04 November 2007
Fig. 1. Onduleur triphasé alimentant un moteur avec neutre isolé.
L’équation de charge est donnée comme suit:
0
di
u=L. +R.i+e+u
Ι
dt
(1)
Où uet isont, respectivement les vecteurs de tensions et de
courants de sortie de l’onduleur, 0
uest la tension entre le
neutre de la charge et le point milieu de la source
d’alimentation de l’onduleur et Ιest le vecteur unitaire qui sont
définis comme suit :
1
2
3
u
uu
u
=
,
1
2
3
i
ii
i
=
,
1
1
1
Ι= .
Grâce à l’équilibre de la charge, la somme des
courants 1
i,2
i,3
iest égale à zéro, (1) donne :
23
1
0
(u +u +u )
u= 3 (2)
La tension de sortie upeut prendre les valeurs /2E
±
selon
l’état de commutation.
Si un courant de référence *
i circule dans la charge donc,
l’équation de charge devient:
*
**
di
u=L. +R.i+e
dt
(3)
Dans ce cas, la tension *
u, et le courant *
isont des fonctions
sinusoïdales, donc la différence entre le courant de charge et le
courant de référence peut être définie comme suit:
*
δ=i-i (4)
De l’équation (1), (3) et (4), nous avons :
*
0
dδ
L+Rδ=u-u -u Ι
dt (5)
L’équation 5 montre qu’à cause de la présence de 0
u,
l’erreur de courant durant une période de commutation n’est
pas triangulaire, car sa pente pour chaque phase dépend de
l’état de toutes les autres phases par 0
u, on appelle ce
phénomène ‘’phénomène d’interférence entre les phases’’.
Pour éviter ce phénomène d’interférence entre les phases dû au
neutre isolé, nous devons découpler l’erreur de courant réelle
comme suit [7].
'''
δ=δ-δ (6)
'
δ
: Erreur de courant découplée
''
δ
: Terme de découplage
On l’appelle erreur de courant découplée, car il est
possible de définir une équation dynamique pour cette
erreur ne dépendant plus de 0
u, et dite découplée car
l’erreur pour une phase donnée ne dépend que de la tension
correspondante à cette phase.
L’équation (6) peut être décomposée en deux
parties comme suit :
*
'
dδ'
L+Rδ=u-u
dt (7)
0
''
dδ''
L+Rδ=-u Ι
dt (8)
Après le découplage de l’erreur de courant et pour une
fréquence de commutation raisonnablement élevée, l’effet
de la résistance du moteur peut être négligé, Le terme
*
uu
−
de l’équation (7) peut être considéré constant durant
une période de commutation, donc l’erreur de courant
possédant une forme linéaire, son signe dépend de la
différence *
uu
−
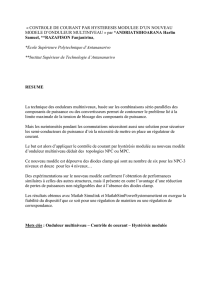
. Le principe de la commande en courant
par hystérésis pour une période de commutation est montré
dans la figure 2 où la tension de sortie de l’onduleur est de
forme créneau d’amplitude /2E±selon une impulsion
positive on
Tou négative off
T .
Fig.2. Erreur de courant dans la bande d’hystérésis, la tension de sortie de
l’onduleur et le signal de synchronisation externe (Clock).
De l’équation (7), et d’après la figure 2 et en négligeant
la résistance du moteur, nous pouvons arriver à :
2
n
4.L.β
T=E(1- u ) (9)
nn
on off
1+u 1-u
T=T ,T =T
22
(10)
Où n
uest la tension normalisée donnée par :
*
n
u=u/(E/2) (11)
L’équation (9) montre que pour le cas de la commande
en courant par hystérésis conventionnelle où la largeur de
bande
β
est constante et n
uvarie d’une période à l’autre,
alors la période de commutation Tvarie aussi. Pour rendre
cette période constante, nous devons modifier la largeur de
bande d’hystérésis d’une façon dynamique. Cette
modification se base sur un contrôle prédictif.
III. COMMANDE EN COURANT PAR HYSTERESIS PROPOSEE
Pour obtenir une fréquence de commutation constante, la
bande d’hystérésis
β
doit être modifiée selon cette
expression :

4th International Conference on Computer Integrated Manufacturing CIP’2007 03-04 November 2007
2
(1 )
4. n
ET
ru
L
β
=− (12)
Un simple estimateur de la bande d’hystérésis 2
β
peut être
obtenu en réarrangeant les équations (9), (10) et (12) afin
d’assurer une fréquence de commutation constante [4]:
2
2
20 0 22
.
42[1]
2
on off off
on
TT T
T
TT
T
ββ β
==−− (13)
Où 0
β
est la bande d’hystérésis maximale déduite
pour 0
n
u=, et donnée par :
0
.
4
r
ET
L
β
= (14)
Comme la fréquence de commutation réelle fest presque
égale à la fréquence de commutation désirée r
f , l’expression
de 2
β
de (13) peut être approximée comme suit :
2
2
20
2[1 ]
..
off
on
rr
T
T
TT TT
ββ
≅−− (15)
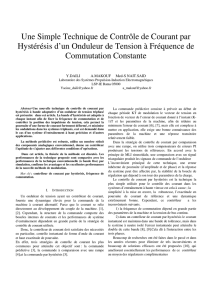
Fig.3. Estimation de la bande d’hystérésis.
L’équation (15) donne une loi de commande très simple
comme le montre la figure 3. On fait l’intégration des
intervalles du temps on
T et off
T des impulsions de commande
et cette intégration sera annulée à chaque commutation du
signal de commande. La sortie de cette intégration Uiproduit
une série de triangles de surface proportionnelle à 2
on
Tet 2
off
T.
Puis, on utilise un filtre passe bas qui donne la valeur moyenne
du signal i
Ucalculée sur une période de commutation
actuelleT. La sortie du filtre passe bas
f
Uest presque égale au
terme : 22
1[]
2on off
TT
T+. La bande d’hystérésis approximée
2
β
est obtenue facilement en ajoutant les autres termes de
l’équation (15) comme le montre la figure 4.
Fig.4. Schéma bloc de variation de la bande d’hystérésis.
L’implantation de l’équation (15) assure uniquement une
fréquence de commutation constante. Dans ce cas, la position
des impulsions de commande n’est pas contrôlée. Pour
avoir une synchronisation efficace, nous devons ajouter
une autre boucle, cette dernière permet de corriger la bande
d’hystérésis afin d’assurer à la fois une fréquence de
commutation constante et synchronisation des impulsions
de commande. La correction de la bande d’hystérésis est
montrée dans la figure 5, où la bande 1
β
est générée par la
PLL.
Fig.5. Schéma bloc de correction de la bande d’hystérésis.
9 Analyse de la stabilité
La PLL est un système asservi, qui assure non seulement
une fréquence de modulation constante, mais minimise
également le déplacement de phase
φ
∆ entre le signal de
référence externe (signal de synchronisation) et le signal de
commande du système avec une précision limitée par le
gain de la boucle [8,9]. Le déplacement de phase
φ
∆
est
détecté entre le centre de l’impulsion de commande et
l’horloge externe, ce qui correspond au passage de l’erreur
de courant par zéro afin de garantir une réduction optimale
des ondulations des courants de charge [4,10].
D’après la figure 5, la nouvelle expression de la bande
d’hystérésis qui permet de faire la synchronisation est
donnée par:
12
β
ββ
=
+ (16)
β
: est la largeur de bande corrigée
1
β
: est la largeur de bande compensée donnée par la PLL
A. Les conditions de stabilité de la boucle qui donne 1
β
La fonction de transfert du détecteur de phase peut être
modélisée comme un intégrateur.
2d
PHD df s
φ
π
∆
==
(17)
Le filtre est de type proportionnel intégrateur PI pour
assurer la stabilité de l’erreur de phase.
11
.
z
p
z
dsT
PI k
dsT
β
φ
+
==
∆ (18)
Le comparateur d’hystérésis de la figure 5 peut être
modélisé selon l’équation (9) qui donne 1/fT
=
en
fonction de n
uet de
β
, où n
uet
β
peuvent être
considérées comme des variables d’entrée, et en
substituant 1/fT
=
dans (9) et en faisant la dérivation
partielle suivant n
uet
β
, les fonctions de transferts

4th International Conference on Computer Integrated Manufacturing CIP’2007 03-04 November 2007
correspondantes
H
Uet
H
β
montrées dans la figure 6 sont
obtenues comme suit:
2n
n
df E
H
Uu
du L
β
==− (19)
2
2[1 ]
4n
df E
H
u
dL
βββ
==− − (20)
Fig.6. Schéma bloc des deux boucles 1
β
et 2
β
.
Le schéma bloc de la PLL est représenté dans la partie
supérieure de la figure 6. De (17), (18) et (20), le gain de cette
boucle GP à la sortie du comparateur d’hystérésis est obtenu
comme suit :
2
22
81
..
[1 ]
p
z
nz
kL fsT
r
GP EusT
π
+
=− − (21)
L’équation (21) montre que le gain GP varie en fonction de
la tension normalisée n
u, ce dernier tend vers l’infini quand la
valeur absolue de la tension normalisée s’approche de l’unité,
et par contre pour de petites valeurs de n
u le gain diminue. Ce
comportement est montré dans la figure (7), où des
représentations asymptotiques de Bode de GP sont
représentées pour 0
n
u= et 0.8
n
u=.
Les grandes variations de GP peuvent provoquer des
résultats d’instabilité, cette instabilité se produit de prés de
valeurs maximales positives et minimales négatives de *
u où
β
est minimale qui affecte la régularité de la modulation et de
l’erreur de courant.
Fig.7. Diagramme de Bode.
B. Les conditions de stabilité de la boucle qui donne 2
β
La bande 2
β
est en fonction de n
u et f. En dérivant (13) et
en tenant compte (12), les fonctions de transferts
correspondantes EF et EU montrées dans la figure 6 sont
obtenues comme suit:
2
0
2
2
1n
r
du
EF f
df T
ββ
+
==− (22)
0
22n
nr
u
d
EU
du T f
β
β
==− (23)
La fonction de transfert du filtre passe-bas LP est
donnée par:
1
1e
LP
s
T
=+ (24)
Où e
T est la constante de temps du filtre
Le gain GE de la boucle de l’estimation de la bande
d‘hystérésis est déduit par (12), (14), (20), (22) et (24) et
en supposant que r
ff
=
.
2
2
11
11
n
ne
u
GE
usT
+
=− −+
(25)
Le gain GE varie aussi en fonction de n
ucomme GP . Si
0
β
possède une valeur propre donnée par (14) et 0
n
u
=
,
l’amplitude de GE est très faible égale à 1. Pour des
grandes valeurs de n
u proches de l’unité, le filtre passe bas
réduit le gain. Le rôle de ce filtre est de réduire les
ondulations et assurer la stabilité de la boucle.
Typiquement, le diagramme de Bode de GE est représenté
dans la figure 7.
Le gain global G est donné par la somme des gains de
deux boucles montrées dans la figure 6 avec le
comparateur d'hystérésis est un bloc commun.
GGPGE
=
+ (26)
Donc, d’après cette analyse de stabilité des deux
boucles, nous constatons que la boucle de la PLL qui
donne 1
β
présente une variation très sensible du gain
quand la tension normalisée n
uvarie, par contre la seconde
boucle qui donne 2
β
n’a pas un grand effet sur la variation
du gain. Donc la stabilité du système est limitée
uniquement à la boucle de PLL.
IV. RESULTATS DE SIMULATION ET DISCUSSION
Les paramètres utilisés en simulation sont montrés dans
le tableau suivant.
TABLEAU I
Paramètres utilisés en simulation
Fréquence de commutation désirée 5KHz
fréquence du fondamental 50Hz
Tension d’alimentation de l’onduleur 500V
La résistance de la charge R=1Ohm
L’inductance de la charge L=10mH
L’amplitude de la force contre-électromotrice 95V
L’amplitude de courant de référence 5A
Paramètres de la PLL 0.002
z
Ts=
0.5
p
k=

4th International Conference on Computer Integrated Manufacturing CIP’2007 03-04 November 2007
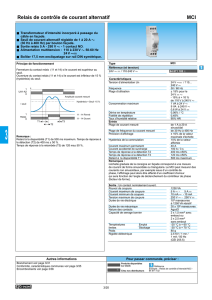
Les résultats de simulation montrés au-dessous montrent
l’efficacité de la technique de commande en courant par
hystérésis proposée par rapport à la technique conventionnelle.
La figure 8 montre les résultats de simulation de la
commande en courant par hystérésis à bande fixe pour une
phase (phase -1-) avant le découplage de l’erreur de courant.
On remarque que le courant de charge est riche en ondulations,
son analyse spectrale donne un THD médiocre (20.29%).
L’erreur de courant n’est plus triangulaire à cause de la
présence du phénomène d’interférence entre les phases et la
fréquence de commutation varie aléatoirement.
(a) Courant de charge
(b) Analyse spectrale du courant de charge
(c) Erreur de courant
(d) Fréquence de commutation
Fig.8. Résultats de simulation de la commande par hystérésis conventionnelle
avant le découplage de l’erreur de courant.
Les résultats de simulation de la commande en courant
par hystérésis à bande fixe après le découplage de l’erreur
de courant sont montrés dans la figure 9. Dans ce cas, Les
ondulations de courant de charge sont réduites. L’analyse
spectrale montre la réduction des harmoniques de courant
de charge avec un THD de 13.88%, mais ces harmoniques
sont distribués dans un intervalle limité par une fréquence
minimale de 4.2KHz et maximale de 5KHz. L’erreur de
courant découplée varie triangulairement dans la bande
d’hystérésis qui est fixée à 2.5A et la fréquence de
commutation varie entre deux valeurs 4.2KHz et 5KHz.
(a) Courant de charge
(b) Analyse spectrale du courant de charge
(c) Erreur de courant découplée
(d) Fréquence de commutation
Fig.9. Résultats de simulation de la commande par hystérésis
conventionnelle après le découplage de l’erreur de courant.
 6
6
1
/
6
100%