Correction TP n°2

TP défauts de l’ALI: Exemple de rédaction
Question : Proposer un protocole permettant de mesurer le courant de saturation de l'ALI.
Réponse :
Mesurande : Courant de saturation de l’ALI isat.
Protocole :
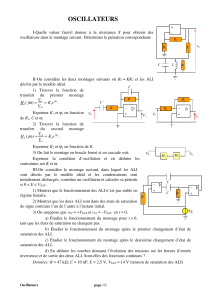
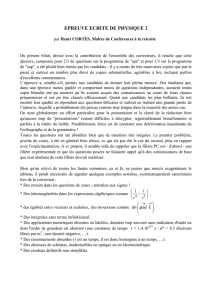
Pour mesurer le courant de saturation on propose le montage suiveur ci-dessous :
On prend une tension d’entrée continue (alimentation stabilisée) pour que le temps de réponse
de l’ALI n’intervienne pas dans les mesures.
On prend pour e une valeur vérifiant –Vsat < |e| < Vsat, par exemple 5 V, afin que l’ALI soit en
régime linéaire et que la saturation en tension ne fausse la mesure.
Sachant que is = e/R, on prend initialement une grande valeur de R (par exemple 10 kΩ) pour
que le courant de sortie soit faible et qu’il n’y ait pas de saturation en courant. Ensuite on
diminue petit à petit R, is augmente jusqu’à une valeur limite qui est le courant de saturation
isat. is étant mesuré à l’aide d’un ampèremètre.
Observation (ou mesure) :
Pour e = 5,0 V, quand on diminue R on observe en effet une augmentation de is jusqu’à une
valeur maximale observée pour R < 200 Ω :
On mesure isat = 25,3 mA
L’incertitude provenant du dernier digit de l’ampèremètre :
2 étant le facteur d’élargissement.
On en conclut que le courant de saturation vaut :
isat = (25,32 ± 0,12) mA à 95% de confiance
Remarques :
- Si on mesure la tension de sortie quand on a saturation en courant, on note qu’elle est
inférieure à Vsat et à e ce qui implique deux choses :
1. Ce n’est pas la saturation en tension de l’ALI qui intervient.
2. Quand il y a saturation en courant l’ALI ne fonctionne plus en régime linéaire
puisque le montage ne fonctionne plus comme un suiveur (e ≠ s).
- Pour évaluer rigoureusement les incertitudes il faut utiliser la notice de l’ampèremètre
utilisé.
-
+
R
e
A
is
s

Question : Proposer un protocole pour mesurer la résistance d'entrée du montage suiveur.
Réponse :
Mesurande : Résistance d’entrée Re.
Protocole :
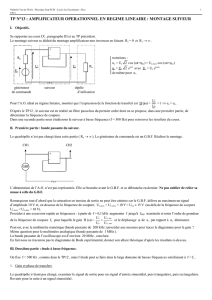
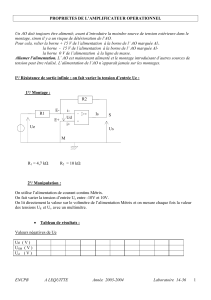
Pour mesurer le courant de saturation on propose le montage suiveur ci-dessous :
Modèle quadripôle équivalent :
On impose une tension continue e par trop élevée pour ne pas avoir de saturation en tension
de l’ALI. La tension d’entrée doit être continue si on ne souhaite pas avoir d’influence de la
partie imaginaire de l’impédance d’entre Ze (qui dépend de la pulsation).
Comme les résistances R et R’ sont en série, un pont diviseur de tension donne :
On fait varier jusqu’à ce que e’ = e/2 et dans ce cas on aura R = Re.
Remarque : ce protocole n’est valable que si l’impédance d’entrée du voltmètre mesurant la
tension e’ est très grand devant Re. Sinon on mesure non pas Re mais Req = Re//Rv c’est-à-
dire :
où Rv est la résistance d’entrée du voltmètre.
Mesure :
Pour e = 10 V, on trouve e’ = 5V pour R = 1 MΩ, qui est la résistance d’entrée du voltmètre
(oscilloscope), on en déduit que Re est très grand devant 1 MΩ. Il faudrait mesurer la
résistance d’entrée du suiveur avec un voltmètre d’impédance d’entrée bien plus élevée.
Remarque :
Dans le cas où la valeur de Re est petite devant Rv, il est bien plus précis de mesurer R avec
un ohmmètre que de simplement donner la valeur de la résistance obtenue par lecture sur la
boîte à décade.
R
e
e’
Re
s
-
+
R
e
e’
s
V
V

Question : Proposer un protocole permettant de mesurer vitesse limite de balayage.
Réponse :
Mesurande : vitesse limite de balayage :
max
dt
dVs
Protocole :
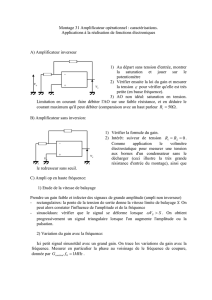
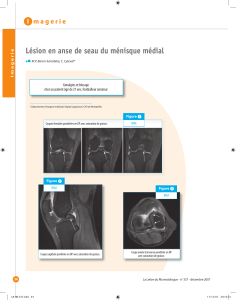
Pour mesurer la vitesse limite de balayage on utilise le montage suivant :
A l’entrée du montage suiveur on applique une tension sinusoïdale alternative. On observe à
l’oscilloscope l’entrée et la sortie. On augmente progressivement la fréquence de la tension
d’entrée pour observer à partir d’une certaine fréquence la déformation du signal de sortie due
à la vitesse limite de balayage.
Observation :
Pour des fréquences inférieures à 10 kHz, la sortie est parfaitement superposée à l’entrée. Le
montage suiveur fonctionne normalement.
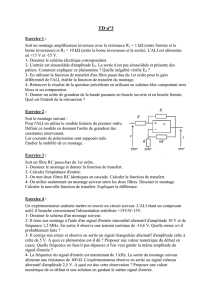
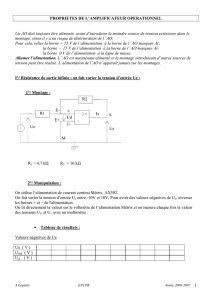
Pour des fréquences supérieures à 50 kHz on observe distinctement une déformation du signal
de la forme :
Le signal d’entrée varie trop vite pour l’ALI qui a une pente maximale, d’où l’allure
triangulaire du signal de sortie.
Pour mesurer la valeur de la vitesse limite de balayage σ on utilise les curseurs.
Remarque : pour que la mesure de la pente soit la plus précise possible la portion de droite
doit occuper la plus grande partie de l’écran de l’oscilloscope possible.
Mesure :
On trouve : σ = 9,1.104 V.s-1
-
+
e
s
Ch1
Ch2
e
s

Calcul d’incertitude :
On a une incertitude relative sur la tension : ΔV/V = 2.10-2
De même pour le temps : ΔT/T = 1.10-3
On en déduit que l’incertitude type vaut :
Le facteur 2 étant le facteur d’élargissement.
On en conclut que la vitesse limite de balayage vaut :
σ = (9,1 ± 0,4) 104 V.s-1 à 95% de confiance
Remarque :
On peut observer la vitesse limite de balayage à n’importe quelle fréquence en prenant un
signal créneau :
Si la période du créneau est très grande, il suffit de zoomer sur les fronts montants ou
descendants pour observer le phénomème désiré sur la sortie.
1
/
4
100%