Modèles et propriétés intrinsèques des différentes

Modèles et propriétés intrinsèques des différentes classes d’actionneurs électro. - durée 1h - G. Clerc
Actionneurs Electriques
1
Plan
•Actionneurs réluctants
•Actionneurs hybrides ou réluctants polarisés
•Actionneurs électrodynamiques
•Actionneurs électromagnétique
•Actionneurs classiques

Modèles et propriétés intrinsèques des différentes classes d’actionneurs électro. - durée 1h - G. Clerc
Actionneurs Electriques
2
Actionneurs réluctants ou machine à réluctance variable
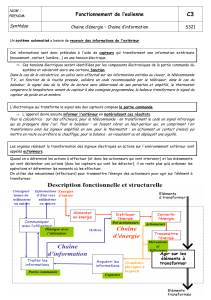
Exemple : électroaimant
Il se présente sous de nombreuses formes mais comporte toujours une partie fixe appelée noyau
et une partie mobile appelée armature. Le noyau peut prendre la forme d'un U, d'un E ou d'un
cylindre et l'armature peut être plate, plongeante ou tournante
a) à noyau en U, armature à clapet pivotant.
bobine
θ
r
b) à armature tournante.
bobine
Pas d ’aimant permanent et pas de terme de couple du à l ’interaction entre une partie fixe
et une partie mobile

Modèles et propriétés intrinsèques des différentes classes d’actionneurs électro. - durée 1h - G. Clerc
Actionneurs Electriques
3
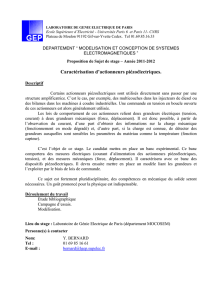
Des moteurs utilisent aussi le principe de la réluctance variable : moteur oscillant (type rasoir
électrique) et moteur pas à pas. Pour ce dernier l'alimentation séquentielle des phases dans l'ordre
A.B.C correspond à un sens de rotation anti-horaire et dans l'ordre A.C.B à un sens de rotation
horaire. Le passage de l'alimentation de la phase A à celle de la phase B provoque une rotation
élémentaire d'un douzième de tour du rotor appelé : pas élémentaire.
Moteur oscillant Moteur pas à pas

Modèles et propriétés intrinsèques des différentes classes d’actionneurs électro. - durée 1h - G. Clerc
Actionneurs Electriques
4
Equation électrique
uri d
dt ri Ldi
dt idL
dddt
r
r
= + = + +
ψθθ(2.1)
Le terme Ldi
dt est appelé f.c.e.m. de transformation inductive et le terme idL
d
d
dt idL
d
r
r
rm
θθθω= est
appelé f.c.e.m. de mouvement ou de déformation de la partie mobile du circuit magnétique.
Equation mécanique
Jd
dt kT T T
mdmfle
ωω+ + + = (2.2)
où kd est le coefficient de frottement visqueux, Tf le couple de frottement sec Tl le couple utile
résistant et Te le couple électromagnétique.
TidL
d
er
=1
22θ(2.3)

Modèles et propriétés intrinsèques des différentes classes d’actionneurs électro. - durée 1h - G. Clerc
Actionneurs Electriques
5
L'expression du couple, si dL
dr
θ est constant, devient Tki
e=2 => Difficulté de réglage
Par ailleurs le couple Te est élevé à courant donné, si
dL
dr
θ est élevé.
Or L est de la forme Nl
S
2µ, et donc dL
dr
θ sera élevé si d
dr
µ
θ l'est.
Ceci s'obtient par une forte variation de flux et donc par passage de la zone linéaire à la zone
saturée du circuit magnétique. De plus ce phénomène entraîne une grande f.c.e.m. de mouvement
et donc demande une tension d'alimentation élevée d'autant plus que la vitesse du mouvement est
grande.
Leur rendement est généralement faible ce qui fait qu'ils sont réservés aux faibles
puissances ou aux régimes non continus.
Grande simplicité de conception et de réalisation ce qui fait qu'ils sont robustes et bon
marché.
Pas de couple da maintien (en l ’absence de courant)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%