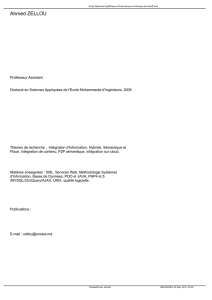
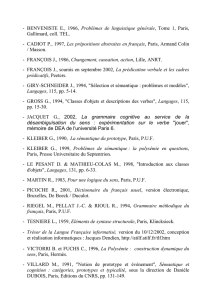
Modèle classique consensuel

Description 3D
(centrée sur l’objet)
Description 2D ½
(dépendante du point de vue)
Représentations structurales stockées
(pictogènes)
Système Sémantique
Traitement des caractéristiques élémentaires de forme
Traitement sensoriel
locale globale
Dénomination
Nom
Sensations
tactiles
Son
Agnosie intégrative
Agnosie de transformation
Agnosie par
perte des RSS
Agnosie de la forme
Agnosie d'accès sémantique
Agnosie asémantique
Précoces
Intermédiaires
Tardifs
RSS
Accès sémantique
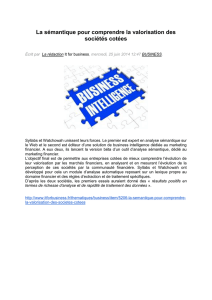
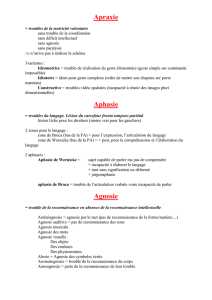
Modèle classique consensuel

Représentation 2 D (Esquisse primaire)
• Extraction parallèle et locale de
caractéristiques 2D (segments de lignes,
tâches, jonctions de lignes..)
• Groupements perceptifs (textures, contours)
Représentation 2.5 D
• Extraction des surfaces: forme, position
• Extraction centrée sur l’observateur
• Extraction non organisée en structure
Représentation 3 D
• Extraction des axes d’élongation/symétrie de
l’objet
• Structuration des surfaces en objet perceptif
en utilisant les axes de l’objet comme
référentiel spatial
Représentation structurale objet-centrée.
Cette représentation est confrontée aux
représentations 3D stockées en mémoire. Il
y a reconnaissance s’il y a appariement.
Modèles computationnels :
‘Vision’ (structurale) de Marr (1982)

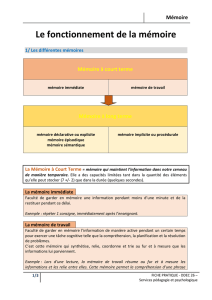
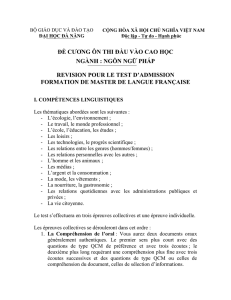
Biederman (1985)
Edge extraction
Determination of
Components
Detection of
Nonaccidental
Properties
Parsing of
Regions of
Concavity
Matching of Components
to Object Representations
Object Recognition
(prototype level)
4
1
Deux
bords
parallèles
Bords
courbes
Jonctions
de type Y
(avec
courbures)
3
4
Jonctions
internes
de type Y
Trois
bords
parallèles
Jonctions
externes
de type flêche
2
1) Extraction des primitives liées
aux contours locaux
2) Extraction des composantes
volumétriques de l’objet
3) Assemblage des composantes
volumétriques en objet
4) Appariemment avec
des objets stockés
en mémoire

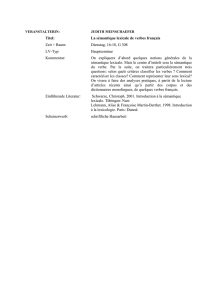
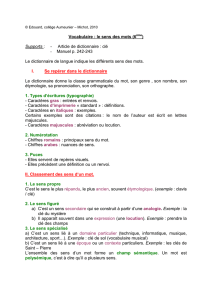
TULVING (1972)
il existe 3 systèmes distincts
mais emboîtés
* La Mémoire Procédurale
* La Mémoire Sémantique
agnosie
* La Mémoire Episodique
amnésie
MP MS
ME

Une famille de modèles
Squire & Alvarez (95), Mc Clelland & Al. (95), Murre
(96), Nadel & Moscowitch (97)…
Variation autour d'un même thème…
1) Une trace épisodique est apprise très rapidement
2) Les traces épisodique servent ensuite de professeur interne pour le
système cortical ('sémantique') afin qu'il apprenne lentement la structure
de cooccurrence des différents élément dans les épisodes vécus par le sujet
Création d'une sémantique
E.G. Bière…. Louvain….Plaisir
Bière…. Bruxelle….Plaisir
Bière….Grenoble…Plaisir
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%