Mémoire 37Cv2 - Olympiades de Physique France

1
DA CONCEICAO Jérémy
DI DOMENICO Clément
Lycée Andrée BOULLOCHE
18 Boulevard Gutenberg
93190 LIVRY-GARGAN
Quand la science s’approche
de la fiction, l’évite
-
t
-
elle
?
De simples aimants peuvent-ils faire
léviter un homme ?

2
Résumé
Dans notre mémoire intitulé « Lorsque la science s’approche de la fiction,
l’évite-t-elle ? », nous présentons dans un premier temps le magnétisme, en
abordant tout d’abord les différents types de magnétisme existant. Puis, nous
montrons le lien qui existe entre électricité et magnétisme par le biais,
notamment, de la célèbre expérience d’Oersted. A la fin de cette grande partie,
nous avons émis plusieurs hypothèses afin de faire léviter un objet, ce qui rejoint
notre objectif de départ, qui est de faire léviter un Homme. Dans une seconde
grande partie, plus expérimentale cette fois, nous expliquons d’où nous est
venue l’idée de réaliser notre maquette grâce à laquelle nous faisons léviter une
balle de ping-pong. Nous présentons alors notre montage, et enfin, nous testons
la viabilité des mesures effectuées (par exemple, celle de l’intensité parcourant la
bobine) via des calculs, que nous avons refaits mais cette fois en se plaçant dans
le cas où l’on ferait léviter un Homme. En conclusion, nous présentons les
différents hoverboards créés à ce jour, et évoquons leurs limites.
Sommaire :
Introduction .................................................................................. 3
I - Qu’est-ce que le magnétisme ? ................................................. 4
1 - Présentation du phénomène .................................................. 4
2 - Lien entre électricité et magnétisme...................................... 5
3 - L’hoverboard et la lévitation magnétique .............................. 6
II - Application pratique et modèle expérimental .......................... 8
1 - Présentation et mise en contexte........................................... 8
2 - Le fonctionnement ................................................................. 9
3 – Viabilité du modèle et étude mécanique.............................. 11
4 - Un hoverboard par sustentation électromagnétique ............ 15
Conclusion ................................................................................... 17
Remerciements............................................................................ 19
Bibliographie et crédit iconographique ... Erreur ! Signet non défini.

3
Introduction :
Le film Retour vers le futur 2 sorti en 1989 a marqué les années 80 et 90
par la vision d’un monde futuriste, en 2015 précisément, qui y était exposée. De
nombreuses technologies, qui sont courantes aujourd’hui comme le paiement
sans contact, les téléviseurs à écran plat ou encore les films en 3D, y étaient
représentés. Mais l’objet le plus impressionnant est de loin l’hoverboard, cette
planche de skateboard volante dont se sert Marty le héros du film lors d’une
course poursuite endiablée.
Cependant aujourd’hui en 2015, soit au moment des événements du film,
nous ne surfons toujours pas dans les airs à 20 centimètres du sol. Mais la
création d’un tel moyen de locomotion semble se préciser et certaines
entreprises annoncent déjà des prototypes ou des hoverboards fonctionnels.
Malheureusement, à l’image de la vidéo publiée par la société HURv Tech mettant
en scène le skateur Tony Hawk et l’acteur Christopher Lloyd, il s’agit le plus
souvent de rumeurs ou de vidéos truquées.
L’intérêt des fans de ce film pour un projet d’hoverboard est très
important, de nombreux forums et sites Internet sont consacrés à ce sujet, mais
est-il vraiment réalisable ? Peut-on réellement mettre au point un appareil de ce
type qui permettrait de jouer avec la gravité ? Nous allons donc dans ce mémoire
démêler le vrai du faux au sujet de l’hoverboard en explorant un des moyens qui
permettrait de faire léviter un être humain à l’aide d’une machine : la lévitation
électromagnétique. Nous avons choisis d’étudier et de centrer nos recherches
autour de ce phénomène étant donné la relative facilité de créer des modèles
expérimentaux et de réaliser des expériences comme vous le verrez dans la suite
du mémoire.
Alors, Marty, en route vers le futur !

4
I – Qu’est-ce que le magnétisme ?
1 - Présentation du phénomène
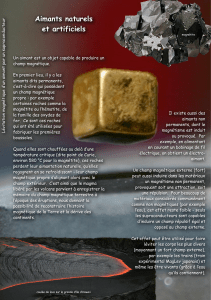
La magnétite est un minéral de formule Fe
3
O
4
. Elle est connue depuis
l'Antiquité par les Hommes pour sa propriété à attirer certains objets métalliques,
ce que nous connaissons aujourd’hui comme le magnétisme. Certains peuples
comme les Chinois et les Olmèques (600 av. J.C.) utilisaient la magnétite à des
fins divinatoires pour déterminer l’emplacement des tombes, des palais et des
temples. Mais les grecs l'utilisaient aussi pour fabriquer des boussoles
rudimentaires utiles à la navigation.
La propriété de la magnétite est appelée ferromagnétisme. On caractérise
ce phénomène par la propriété de certains corps à s’aimanter sous l’effet d’un
champ magnétique, c’est-à-dire que ces derniers produisent à leur tour un autre
champ magnétique. Certains matériaux tels que les aimants vont garder une
aimantation importante après disparition du champ magnétique extérieur : c’est
l’aimantation rémanente.
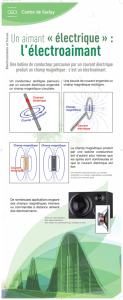
On peut caractériser le phénomène du magnétisme grâce à la notion de
champ magnétique. C’est une grandeur physique qui permet de modéliser et
quantifier les effets magnétiques d’un aimant permanent ou d’un électroaimant.
L’unité du champ magnétique est le Tesla (T). Le champ magnétique est aussi
caractérisé par sa bipolarité, il possède toujours un pôle Nord et un pôle Sud
.
Dans le cadre de deux aimants droits, on remarque expérimentalement
que les pôles opposés s’attirent alors que les pôles semblables se repoussent,
comme le montre le schéma suivant.
Fig.1
A partir du XV
ème
siècle, les premières études scientifiques sur le
magnétisme commencent avec l’anglais Gilbert, et vont continuer jusqu’à nos
jours avec Coulomb, Ampère, Faraday et Maxwell.

5
Aujourd'hui grâce aux avancées scientifiques on peut distinguer deux
autres types de magnétisme :
- Le paramagnétisme. Lorsqu’un corps paramagnétique est plongé dans un
champ magnétique, celui-ci va générer un champ magnétique, qui est dirigé
dans le même sens que celui appliqué. Cette aimantation disparaît cependant
quand le champ magnétique n’est plus appliqué. Les corps paramagnétiques
possèdent une susceptibilité magnétique positive et très proche de 0. Mais le
paramagnétisme est particulier car il peut changer selon les conditions
extérieures. Par exemple, un corps ferromagnétique peut devenir
paramagnétique s’il dépasse sa température de Curie. Le matériau perd alors son
aimantation spontanée, mais peut la retrouver lorsque sa température redescend
en dessous de sa température de Curie.
- Le diamagnétisme qui est le contraire du paramagnétisme. Lorsqu’on applique
un champ magnétique sur un matériau diamagnétique, celui-ci va générer un
champ opposé à celui appliqué. Au niveau de l’atome, le diamagnétisme est dû à
une perturbation du comportement des électrons autour du noyau atomique.
Cependant son effet est souvent masqué par celui des deux autres types de
magnétisme (paramagnétisme et ferromagnétisme) qui sont nettement plus
importants.
Toutes ces propriétés magnétiques sont expliquées par un unique
phénomène, celui de la susceptibilité magnétique. Il s'agit de la capacité d’un
corps à s’aimanter sous l’action d’un champ magnétique.
En fonction du signe de la susceptibilité pour un élément donné, on peut
déterminer ses propriétés magnétiques.
- Les corps diamagnétiques sont caractérisés par une susceptibilité magnétique
négative très proche de 0.
- Les corps paramagnétiques et ferromagnétiques ont eux une susceptibilité
magnétique positive, à l'origine du champ créé dans le même sens du champ
magnétique appliqué. C’est pour cette raison qu’ils sont attirés par un aimant par
exemple.
2 - Lien entre électricité et magnétisme
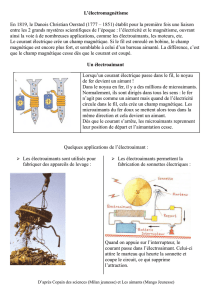
Christian Oersted fut le premier à faire le lien entre magnétisme et
électricité en 1819. En effet, il réalisa une expérience dans laquelle il rapprocha
une boussole d’un circuit électrique. Lorsque le courant ne passe pas, la boussole
continue de pointer le nord magnétique terrestre. Cependant lorsque le courant
circule l’aiguille dévie de sa position initiale. Nous avons reproduit cette
expérience (Fig. 2 et 3).
Le lien entre électricité et magnétisme peut être aussi mis en valeur par
une autre expérience. On relie un voltmètre à une bobine de fil de cuivre. On
passe un aimant droit à l'intérieur de la bobine en faisant des va-et-vient. On
remarque alors que le voltmètre affiche une tension.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%