AUTOMATE PROGRAMMABLE INDUSTRIEL

27/12/2015
1
1
AUTOMATISME
2
Ordres
Compte
Rendu
Opérateur
SYSTEMES AUTOMATISES
Un Système Automatisé est toujours composé d'une Partie Commande et
d'une Partie Opérative.

27/12/2015
2
3
Ordres
Compte
Rendu
Opérateur
SYSTEMES AUTOMATISES
La Partie Commande
C'est la partie qui gère le fonctionnement du Système Automatisé.
4
Ordres
Compte
Rendu
Opérateur
SYSTEMES AUTOMATISES
La Partie Commande
C'est la partie qui gère le fonctionnement du Système Automatisé.
La partie commande reçoit les consignes de l'opérateur.

27/12/2015
3
5
Ordres
Compte
Rendu
Opérateur
SYSTEMES AUTOMATISES
La Partie Commande
C'est la partie qui gère le fonctionnement du Système Automatisé.
Elle adresse des ordres à la partie opérative.
La partie commande reçoit les consignes de l'opérateur.
6
Ordres
Compte
Rendu
Opérateur
SYSTEMES AUTOMATISES
La Partie Commande
C'est la partie qui gère le fonctionnement du Système Automatisé.
Elle adresse des ordres à la partie opérative.
La partie commande reçoit les consignes de l'opérateur.
Elle reçoit des Compte-rendu de la partie
opérative.

27/12/2015
4
7
Ordres
Compte
Rendu
Opérateur
SYSTEMES AUTOMATISES
La Partie Commande
C'est la partie qui gère le fonctionnement du Système Automatisé.
La partie commande reçoit les consignes de l'opérateur.
8
Ordres
Compte
Rendu
Opérateur
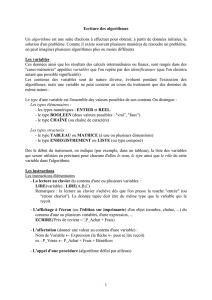
SYSTEMES AUTOMATISES
logique câblée: A partir du cahier des charges, on réalise
le fonctionnement de ce système en le câblant (Relais.
contacts,...) dépend de la technologie utilisée
logique programmée: Les éléments extérieurs à la partie
commande (boutons poussoirs, capteurs, bobines de
contacteurs, pré actionneurs, ...) sont raccordés à un
système informatique ( automate programmable), celui-ci
étant programmé pour répondre au cahier des charges

27/12/2015
5
9
Ordres
Compte
Rendu
Opérateur
SYSTEMES AUTOMATISES
Logique câblée Logique programmée
avantages
Peu
coûteuse lorsque le système est
peu
complexe
au niveau de sa
partie
commande
Le
fonctionnement de l'automatisme est modifiable
par
programme
(ce programme peut être élaboré "hors
machine"
puis
implanté en peu de temps).
inconvénients
Si
on désire modifier l'automatisme, il
faut
tout
décâbler pour recâbler !
Le
prix de revient est plus élevé que celui d'une
logique
câblée
lorsque l'automatisme est simple.
10
PARTIE COMMANDE
AUTOMATE PROGRAMMABLE INDUSTRIEL
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
1
/
26
100%