Conception de transducteurs acoustiques mi - TEL (Thèses-en

INSTITUT NATIONAL POLYTECHNIQUE DE GRENOBLE
N° attribué par la bibliothèque
|__/__/__/__/__/__/__/__/__/__/
THESE
pour obtenir le grade de
DOCTEUR DE L'INPG
Spécialité : Micro
et N
ano
E
lectronique
préparée au laboratoire
TIMA
Dans le cadre de l'Ecole Doctorale
ELECTRONIQUE, ELECTROTECHNIQUE, AUTOMATIQUE, TELECOMMUNICATION,
SIGNAL
présentée et soutenue publiquement
par
C
ristiano Costa
Domingues
le
29
avril
200
5
Titre :
Conception de
transducteurs
acoustiques micro
-
usinés
________
Directeur de thèse :
Bernard COURTOIS
________
JURY
M.
Pierre GENTIL
, Président
M.
Ja
u
me ESTEVE
, Rapporteur
M.
Sylvain BALLANDRAS
, Rapporteur
M. Bernard COURTOIS
, Directeur de thèse
M.
Salvador MIR
, Co
-
encadrant
M.
Libor RUFER
, Co
-
encadrant


Remerciements
C
ristian
o Co
sta
Domingues
Conception de transducteurs acoustiques micro
-
usinés
- 1 -
REMERCIEMENTS
Je tiens, avant tout, à remercier M. Bernard COURTOIS, le directeur du laboratoire TIMA, pour
m'avoir accueilli au sein du groupe RMS.
Je remercie particulièrement M. Salvador Mir et Libor Rufer, mes co-directeurs de thèse, pour leur
dispon
ibilité permanente, pour le suivi qu ils ont
assuré
et pour m'avoir fourni tous les moyens
nécessaires au bon déroulement de cette thèse de doctorat.
Je remercie Mme. Valérie Petrini ainsi que M. Jean
-
claude Jeannot pour leur aide à la réalisation de la
g
ravure.
Je remercie les membres de mon jury, M. Jaume ESTEVE et M. Sylvain Ballandras pour avoir
consacré une partie de leur temps afin de juger mon travail, M. Pierre GENTIL pour avoir accepté de
présider ma thèse.
Je remercie chaleureusement tous les actuels ou anciens membres du laboratoire TIMA : Ahcène,
Luis, Achraf, Emmanuel, Rabeb, Zein, Skandar, Benoit, Hubert, Alexandre, Robin et plus
particulièrement ceux du fameux bureau 120 avec lesquels ce fut un plaisir de cohabiter : Yasser,
Marcin, Sergio, Fabien, Nicolas grâce à qui Word n a plus de secret pour moi, et pour finir Guillaume
et Amel.
Je remercie aussi l'équipe administrative du TIMA pour leur gentillesse et leur serviabilité
.
Je remercie enfin mes parents, mon frère et Allisson pour le soutien et les encouragements qu ils
m ont apporté durant ces années passé loin d eux.


Table des matières
C
ristian
o Co
sta
Domingues
Conception de transducteurs acoustiques micro
-
usinés
- 3 -
TABLE DES MATIERES
CHAPITRE I
INTRODUCTION
...................................................................................................13
I.1.
Les micro et nanosystèmes
...................................................................................................13
I.2.
Le marché des microsystèmes et les applications industrielles
............................................14
I.3.
Principe de base d un microsystème
....................................................................................16
I.4
.
Objectifs et présentation des travaux de recherche
..............................................................17
I.5.
Structure du mémoire de thèse
.............................................................................................18
CHAPITRE II
TRANSDUCTEURS ULTR
ASONORES MICRO
-
USINES
...................................21
II.1.
Introduction
..........................................................................................................................21
II.2.
Principe et applications d ultrasons
......................................................................................21
II.2.1.
Historique
....................................................................................................................21
II.2.2.
Principe
........................................................................................................................22
II.2.3.
Physique des ultrasons
................................................................................................
.
22
II.2.3.1.
Propagation des ondes ultrasonores dans l air
....................................................22
II.2.3.2.
Réflexion et réfraction des ondes ultrasonores
...................................................23
II.2.4.
Les applications des systèmes ultrasonores
................................................................
.
25
II.3.
La mesure de distance
..........................................................................................................26
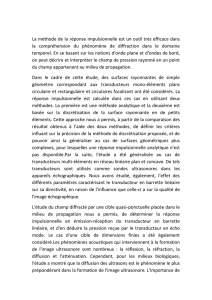
II.3.1.
Pri
ncipe de mesure de distance par ultrasons
..............................................................27
II.3.2.
Méthodes de mesure de distance par ultrasons
............................................................28
II.3.2.1.
Mesure du temps d
e vol
......................................................................................28
II.3.2.2.
Mesure de distance par la puissance du signal reçu
............................................28
II.3.2.3.
Mesure du temps et angle à l arrivée
..................................................................29
II.3.2.4.
Méthode de mesure par onde entretenue et par la modification de phase
...........29
II.4.
Principes des transducteurs ultrasonores mic
ro
-
usinés
........................................................30
II.4.1.
Transducteurs capacitifs
.............................................................................................31
II.4.2.
Transducteurs piezoélectriques
...................................................................................34
II.4.3.
Capteurs piezorésistifs
................................................................................................37
II.4.3.1.
La piezoresistivité
...............................................................................................37
II.4.3.2.
Piezorésistivité du
silicium polycristallin
...........................................................38
II.4.3.3.
Facteurs de jauge
................................................................................................39
II.4.4.
Sensibilité de quelques transducteurs ultrasonores
.....................................................41
II.5.
Quelques techniques de traitement du signal pour les capteurs capacitifs et piezorésistifs
.
41
II.5.1.
Le traitement de la variati
on de résistance électrique
..................................................41
II.5.1.1.
Le diviseur de tension
.........................................................................................41
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
1
/
159
100%