dst__11-15__version_corrigee_2

Saint Thomas de Villeneuve Chaville Classe de terminale
1
Document 1a:
Mailles carrées
Remarque : Un tamis à maille carrée possède des propriétés diffractantes identiques à celles observées
lors de la superposition de deux fentes allongées de même largeur et disposées perpendiculairement
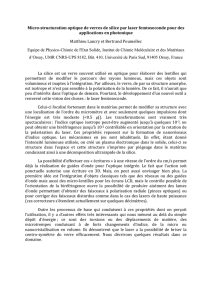
Document 1b:
Figure de diffraction
Rédiger correctement chaque réponse en la justifiant. N'oublier pas d'écrire les expressions
littérales avant les applications numériques. Donner les résultats dans la notation scientifique
quand c’est nécessaire, sans oublier les unités. Faire les exercices sur une copie séparée.
Calculatrice autorisée, mais non échangeable. Ne rendre que l’annexe avec la copie.
EXERCICE n°1 : Diffraction de la lumière à travers un tamis
La production de certains catalyseurs nécessite de déposer un métal noble (Pd, Pt, Au) sur un
support inerte comme de la silice (SiO2). La silice commerciale se présente sous forme de
petits grains blancs de tailles différentes : il est nécessaire de trier ces grains à l’aide de
tamis pour fabriquer des catalyseurs tous identiques.
Le but de cet exercice est de vérifier la taille des mailles d’un tamis en effectuant une
expérience de diffraction par un faisceau LASER.
Données : Constante de Planck : h = 6,63.10–34 J.s ;
Célérité de la lumière dans le vide : c = 3,0.108 m.s-1
1. Première partie : La lumière, une onde
Le caractère ondulatoire de la lumière fut établi au XIXe siècle par des expériences
d’interférences et de diffraction montrant, par analogie avec les ondes mécaniques, que la
lumière peut être décrite comme une onde.
1-1 Définir la notion d’onde progressive.
Une onde progressive est une perturbation qui se propage sans transport de matière mais
avec transport d’énergie.
1-2 Fresnel a utilisé les rayons solaires pour réaliser son expérience. Une telle lumière
est-elle monochromatique ou polychromatique ?
La lumière solaire est une onde polychromatique, superposition de toutes les radiations
colorées du spectre.
2. Deuxième partie : Lumière LASER
Un faisceau LASER de longueur d’onde dans le vide λ0 = 532 nm et se propageant dans l’air,
est dirigé vers un tamis de laboratoire (sorte de grille) à maille carrée de côté a. On observe
sur un écran une figure de diffraction identique à celle représentée dans le document 1b.
2-1 Dans quelle condition le phénomène de diffraction est-il observable ?
DST TS2 - PHYSIQUE - AVEC CALCULATRICE
9 novembre 2015 - 2h30

Saint Thomas de Villeneuve Chaville Classe de terminale
2
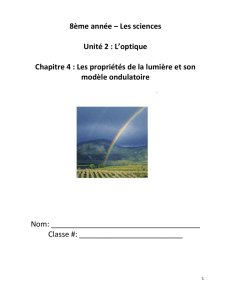
Document 2 :
Tache
centrale
O
Ecran
T
E
Le phénomène de diffraction est d’autant mieux observable que la taille de l’ouverture est petite face
à la longueur d’onde de la lumière jusqu’à a = 100λ.
2-2 Une onde lumineuse est caractérisée par une périodicité spatiale et une périodicité
temporelle. Nommer ces périodicités et préciser leur unité.
La périodicité temporelle correspond à la période T, qui s’exprime en secondes.
La périodicité spatiale correspond à la longueur d’onde , qui s’exprime en mètres.
2-3 Rappeler la relation qui lie la longueur d’onde dans le vide λ0, la célérité de la lumière c
dans le vide et la période T0.
c =
0
0
T
or 0 =
0
1
T
c = 0.0
2-4 Exprimer puis calculer la valeur de la fréquence
0
correspondant au faisceau LASER
utilisé.
0 =
0
c
0 =
8
9
3 10
532 10
= 6×1014 Hz
2-5 Calculer l’énergie E0 associée à un photon LASER de fréquence
0
.
E0 = h.0 E = 6×1014×6,63.10-34 = 4×10 –19 J
3. Troisième partie : Dimension des mailles du tamis
Le LASER est placé à une distance d = 40 cm du tamis ; la distance entre le tamis et l’écran
vaut D = 2,0 m. La tache centrale est un carré de côté L = 2,66 cm. (Document 2)

Saint Thomas de Villeneuve Chaville Classe de terminale
3
Document 3a :
Schéma du montage
Document 3b :
Figure d’interférence
3-1 A l’aide du document 2, établir la relation qui lie θ, L et D. On se placera dans
l’approximation des petits angles : tan
=
(rad).
Dans le triangle rectangle TOE ci-dessus : tan =
LL
2
D 2.D
or tan =
On obtient alors = L/2D
3-2 Rappeler la relation qui lie l’écart angulaire
à la longueur d’onde λ et au côté a de la
maille.
=
a
3-3 Exprimer puis calculer la dimension a d’une maille du tamis en utilisant les données
expérimentales données ci-dessus. Exprimer a en μm.
D’après la relation précédente : a =
et = L/2D a =
2D
LL
2D
a =
9
2
2 2,0 532 10
2,66 10
= 8,0×10-5 m = 80 µm
4. Quatrième partie : Pour aller plus loin
On désire mesurer la longueur d’onde du laser utilisé par interférences.
Dans le montage précédent le tamis à maille carrée est remplacé par une double fente F1F2.
Les deux fentes sont distantes de a1-2 = 0,400 mm. Des franges d’interférences sont
observées sur un écran situé à une distance D’ = 3,0 m. (Voir document 3)
4-1 Deux phénomènes caractéristiques des ondes se produisent ici : lesquels ?

Saint Thomas de Villeneuve Chaville Classe de terminale
4
Il s’agit de la diffraction des ondes à travers les fentes, puis de leurs interférences
lorsqu’elles se croisent.
4-2 Légender la figure d’interférences donnée en annexe 1 à rendre avec la copie et
préciser la contribution de chaque phénomène.
On fait apparaître la tache centrale et les zones de 1ère extinction conséquences de la
diffraction puis les franges sombres et claires et l’interfrange i conséquences des
interférences.
4-3 Expliquer en quelques mots le phénomène d’interférences.
Lorsque 2 ondes se croisent elles peuvent interférer si elles sont synchrones et cohérentes,
c'est-à-dire si elles ont même fréquence et si le décalage entre les 2 est constant.
4-4 Que se passe-t-il au niveau d’une frange brillante et au niveau d’une frange sombre.
Qu’observe-t-on au centre de l'écran pour une ordonnée y = 0 ?
Quand les 2 ondes sont en phases, les interférences sont constructives, on observera à
l’écran des franges brillantes.
Quand les 2 ondes sont en opposition de phases, les interférences sont destructives, on
observera à l’écran des franges sombres.
4-5 On mesure une distance d = 25,0 mm entre le centre d'une première frange lumineuse
et le centre de la septième frange lumineuse consécutive. Sachant que la distance
entre les centres de deux franges consécutives de même nature (interfrange) est
constante telle que i = 𝜆𝐷′
𝑎1−2 , calculer la longueur d’onde exp du laser utilisé.
On a λ = i . a12 / D’ or il y a 7 franges donc 6 interfranges donc i = d/6
λ = 25,0.10-3x 0,400x10-3 / 6 x 3,00 = 556.10-9 m = 556 nm
4-6 Comparer la valeur de la longueur d’onde exp avec la longueur d’onde λ0 = 532 nm
donnée par le fabricant.
On calcule l’erreur relative ε = │λexp – λ0 / λ0│x 100 = 4,5% ce qui est acceptable car <10%
4-7 Quelle est la couleur de la lumière LASER utilisée ?
La radiation sera rouge.
4-8 Pourquoi mesurer plusieurs interfranges au lieu d'un seul ?
En mesurant 10 interfranges, on obtient une mesure plus précise car on diminue l’incertitude
relative.
4-9 Pour un point M situé à une ordonnée yM sur l’écran, on trouve une valeur de la
différence de marche telle que δ = 2,13 μm. Le point M est-il situé sur une frange
brillante ou une frange sombre ?
Par définition, on a δ = kλ quand les interférences sont constructives.
Calculons δ/λ = 2,13.10-6/532.10-9 = 4,00, k est un entier relatif donc le pont M est situé sur
une frange brillante.
4-10 On s’éloigne encore du centre O de l’écran jusqu’au point N pour lequel δ = 3,19 μm.
Combien de franges brillantes a-t-on rencontré entre M et N ? On pourra s’aider d’un
schéma.
De même, calculons δ/λ = 2,19.10-6/532.10-9 = 6,00, k est un entier relatif donc le pont N est
situé sur une frange brillante. Il y a donc 1 frange brillante entre les 2, celles correspondant
à k = 5.

Saint Thomas de Villeneuve Chaville Classe de terminale
5
Document 1 : Principe de fonctionnement des capteurs
Les radars, capteurs ultrasonores et lasers sont tous constitués d'un émetteur qui génère une
onde pouvant se réfléchir sur un obstacle et d'un capteur qui détecte l'onde réfléchie. Le
capteur permet de mesurer la durée entre l'émission et la réception de l'onde après réflexion
sur l'obstacle. Le radar utilise des ondes radio. Le sonar utilise des ultrasons tandis que le
laser d'un LIDAR émet des impulsions allant de l'ultra-violet à l'infrarouge.
Document 2 : Extrait d'une notice de « radar de recul » (aide au stationnement)
En marche arrière le « radar de recul » se met
en fonction automatiquement.
L'afficheur indique la distance de l'obstacle
détecté pour des valeurs comprises entre
0,30 m et 2,0 m.
L’afficheur dispose d’un buzzer intégré qui
émet un signal sonore dont la fréquence évolue
en fonction de la distance à l'obstacle.
EXERCICE n°2 : Les ondes au service de la voiture du futur
« Sans les mains ! C'est de cette manière que vous
pourrez, peut-être très bientôt, conduire votre prochaine
voiture... ». Cette phrase évoque ici la voiture autonome
dont la commercialisation sera lancée aux alentours de
2020.
Cette voiture « se conduira seule », car elle aura une
perception globale de son environnement grâce à la
contribution de plusieurs capteurs : télémètre laser à
balayage (LIDAR*), caméra, capteurs à infrarouge,
radars, capteurs laser, capteurs à ultrasons, antenne
GPS.
*LlDAR = Light Detection And Ranging
Un odomètre mesure la distance parcourue par la voiture.
L'objectif de cet exercice est d'étudier quelques capteurs présents dans une voiture
autonome.
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%