Cours n°1

Cours d’info2 : microcontrôleur
«!mid-range!» pic16fxxx
Eric Nativel
IUT Nîmes - GEII – S2
Année universitaire 2014 – 2015
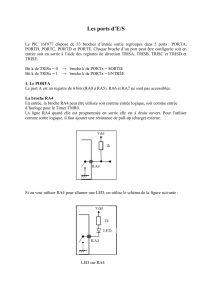
processeur mémoire carte d’extension
écran
clavier, souris
stockage de masse
usb
série
parallèle
ethernet
Bus de données
Bus d’adresse
Bus de contrôle
->uC pic

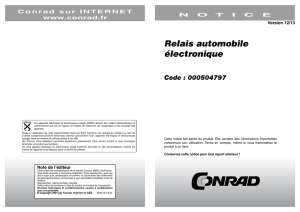
Processeur
•CPU : Central Unit Processor == unité de traitement de données
•== «!cerveau!» de tout système informatique
•gère et contrôle les opérations arithmétiques et logiques des
processus informatiques
•Ne comprend que le langage binaire == suite de codes binaires
uniques pour 1 type de processeur donné
–Architecture CISC : jeu d’instructions puissantes non limités, temps
d’exécution variable
–Architecture RISC : jeu d’instructions réduits simple, temps d’exécution
garanti et optimisé
•Algorithme codé en assembleur premier langage informatique :
–Assembleur correspondance mnémonique vers code binaire
Ex: LD 0x12,w
– bas niveau -> langage C, langage évolué
Ex : printf(‘‘coucou‘‘);
retour
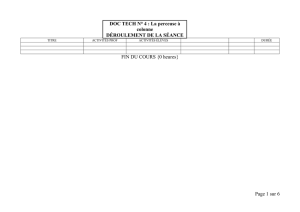
Contenu d’un CPU
•Une UAL pour effectuer des opérations arithmétiques et
logiques.
•Un registre d'instruction associé à un décodeur
permettant de décomposer et d'organiser l'exécution de
l'instruction.
•Un certain nombre de registres internes, pour stocker
temporairement des données ou les bits de conditions.
•Un système de gestion d'adresses, permettant la
localisation des informations, qu'elles soient données ou
instructions.
•Un ensemble de Bus, permettant de véhiculer soit des
données, Bus de données, soit des adresses, Bus
d'adresse, soit des informations permettant de contrôler
ces transferts, Bus de contrôle.

Mémoires
•Mémoire morte (Read Only Memory): garde
le contenu en absence d’alimentation (non
volatile), vitesse d’accès lente
–ROM, PROM (vraiment «!Read Only!»), EPROM,
EEPROM, UVPROM, flash
•Mémoire vive (Random Access Memory) :
perd le contenu de la mémoire en absence
d’alimentation (volatile), vitesse d’accès
rapide
–RAM, DRAM, SRAM, MRAM (non volatile)
retour
Bus
•Bus d’adresse : permet de sélectionner un
composant selon son adresse sur le
système
•Bus de contrôle : permet de contrôler ces
transferts
•Bus de données : véhicule les données
entre les différents composants du
système
retour

Microcontrôleur / Microprocesseur
•Microcontrôleur = processeur + mémoires
+ périphériques (module d’interface)
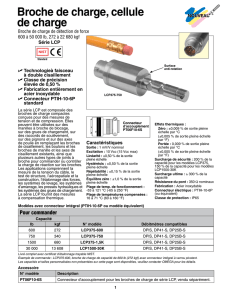
Microcontrôleur : pic16f877

Microcontrôleur : pic16f877
structure pic16f877
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%