MACHINES A COURANT CONTINU

MACHINES A COURANT CONTINU
ELEMENTS DE COURS
Année 2008-2009 Licence GE 3ème année / Parcours SEEC
1

Ce document est un support qui ne développe qu’une partie de ce qui sera vu en cours.
Sommaire
I) Constitution et représentation des machines
Rôle des constituants
Rotor : Induit, Collecteur, …
Stator : Inducteur bobiné / à aimants, ….
Vues en coupe transversale ou longitudinale, vue transversale développée, vue développée de l’entrefer
II) Mise en Equations et schémas équivalents de la Machine à courant continu
A) Tracé des lignes de champs de l’inducteur et de l’induit
B) Equations et schémas équivalents
A) Machine à courant continu à excitation bobinée et non saturée
B) Machine à courant continu à aimant
C) Machine à courant continu à excitation bobinée et saturée
Sans RMI (Réaction magnétique d’induit)
Avec RMI
D) Autres imperfections
Annexes
Réponse dynamique d’une MCC, réponse temporelle à un démarrage direct et réponse fréquentielle
Notations
Références
Quelques données constructeurs
2

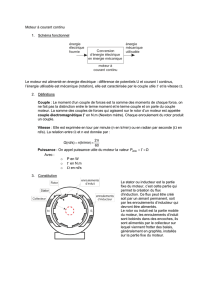
I. Constitution et représentation des machines
Figure I-1 : Coupe transversale d’une MCC (Conducteurs d’induit non représentés)
Figure I-2 : Coupes transversale et longitudinale (Conducteurs d’induit non représentés)
Figure I-3 : Coupes transversale et longitudinale (Conducteurs d’induit non représentés)
3

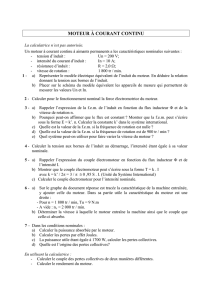
Figure I-4 : Coupe transversale coté collecteur
avec représentation de la connexion des balais
S
N
Figure I-5 : Identique avec représentation de la
connexion des lames de collecteur
Figure I-6 : Vue transversale développée de l’entrefer vue du collecteur
4

S
N
a
b
1
2
3
4
5
6
6
5
4
Axe
stator
Axe
section 1
Figure I-7 : Vue développée de l’entrefer
Figure I-8 : Vue éclatée d’une MCC
5
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%